Machine Learning for Magnetic Anomaly Navigation
Wright Brother Institute AI/ML Collider, 2023-05-17
The views expressed in this article are those of the author and do not necessarily reflect the official policy or position of the United States Government, Department of Defense, United States Air Force or Air University.
Distribution A: Authorized for public release. Distribution is unlimited. Case No. 2023-0388.
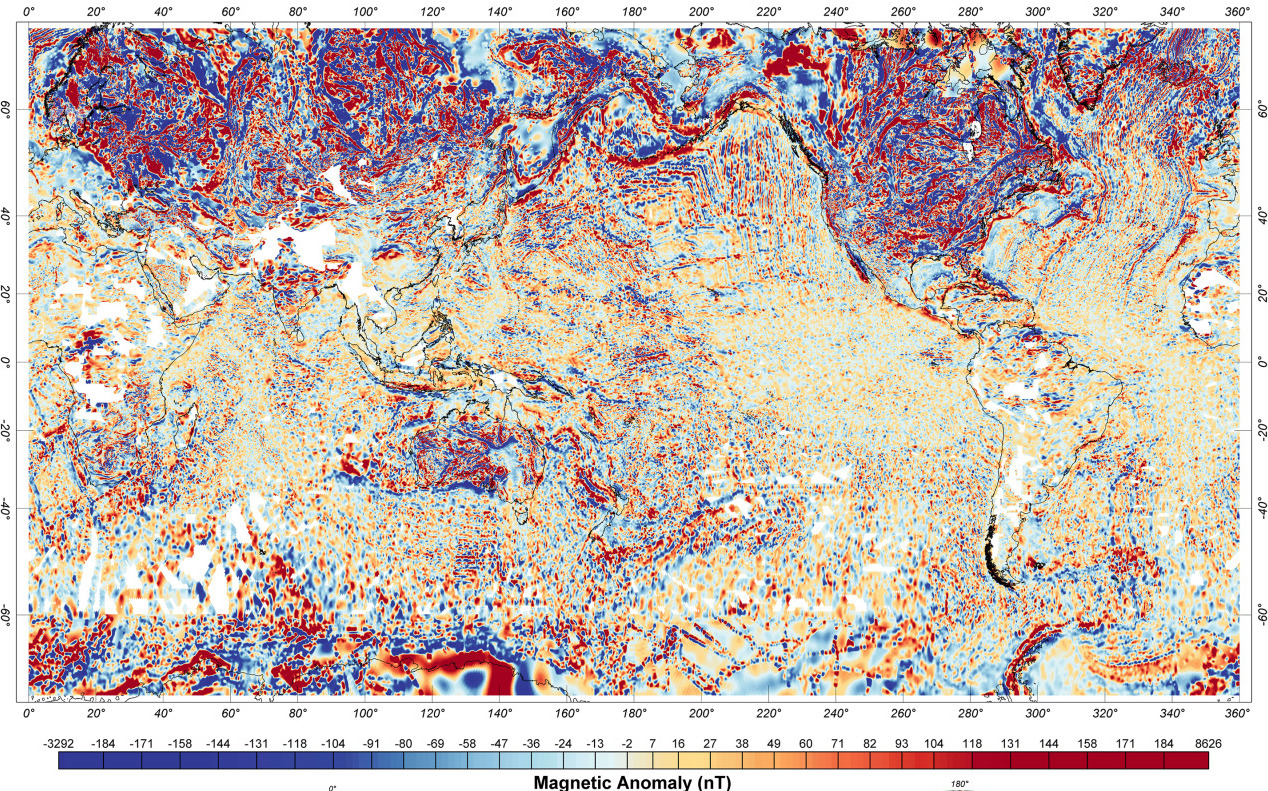
Magnetic Anomaly Navigation Overview
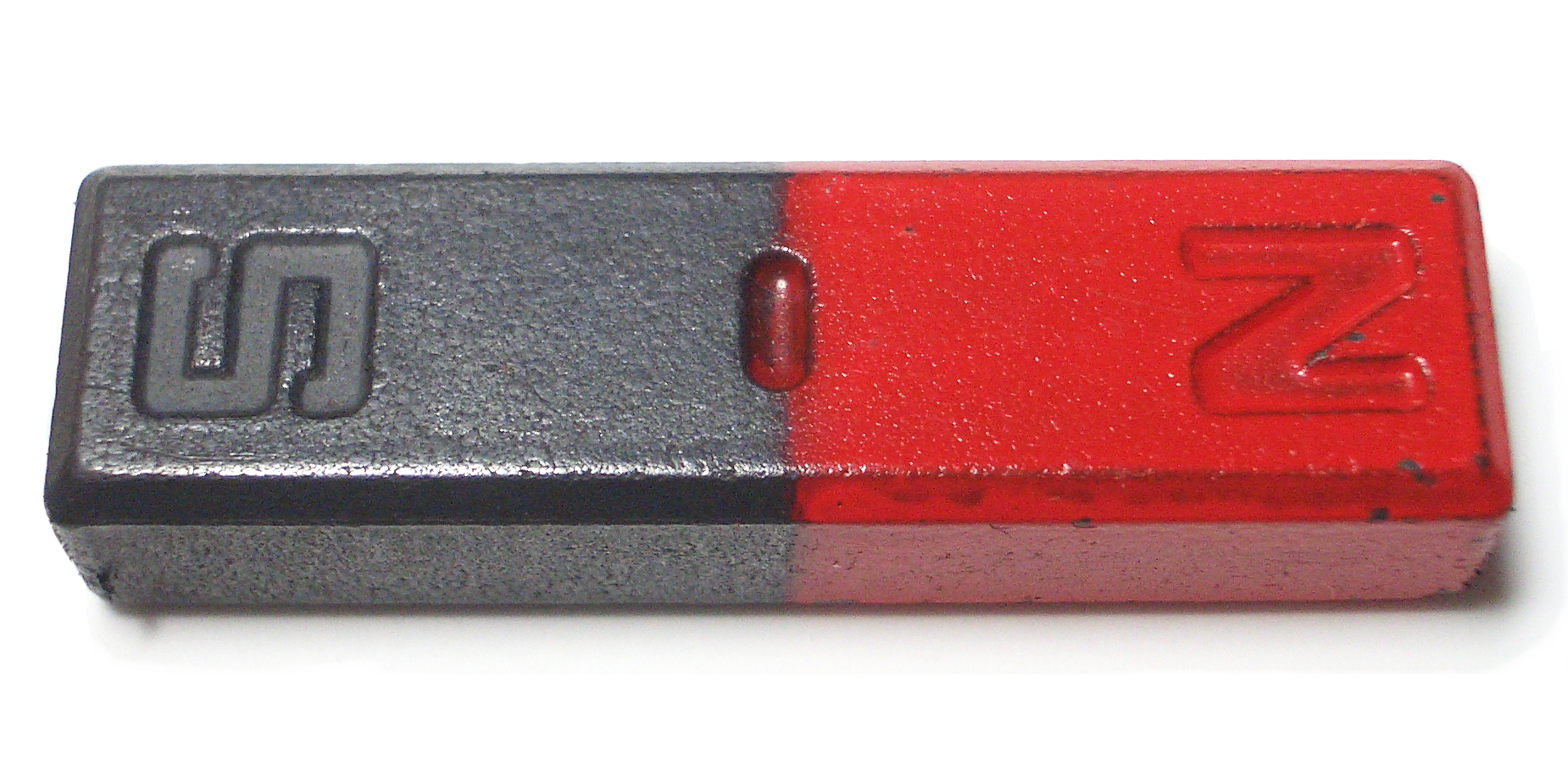
Refrigerator magnet 
Earth’s core field (compass) 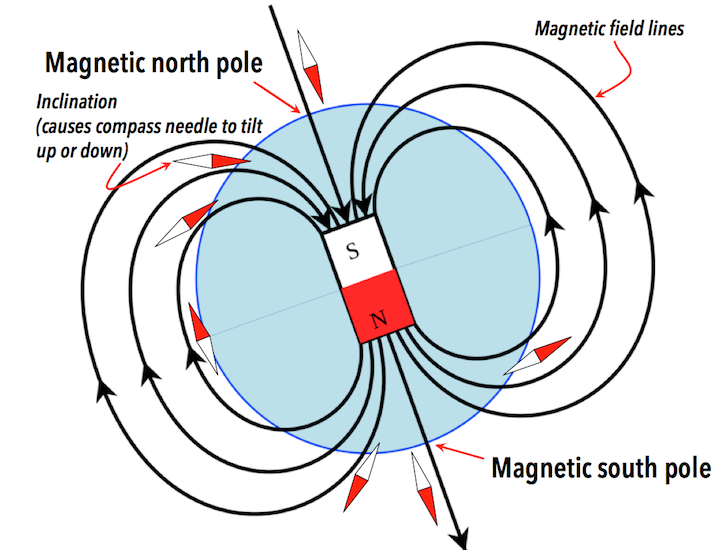
Crustal magnetic anomaly 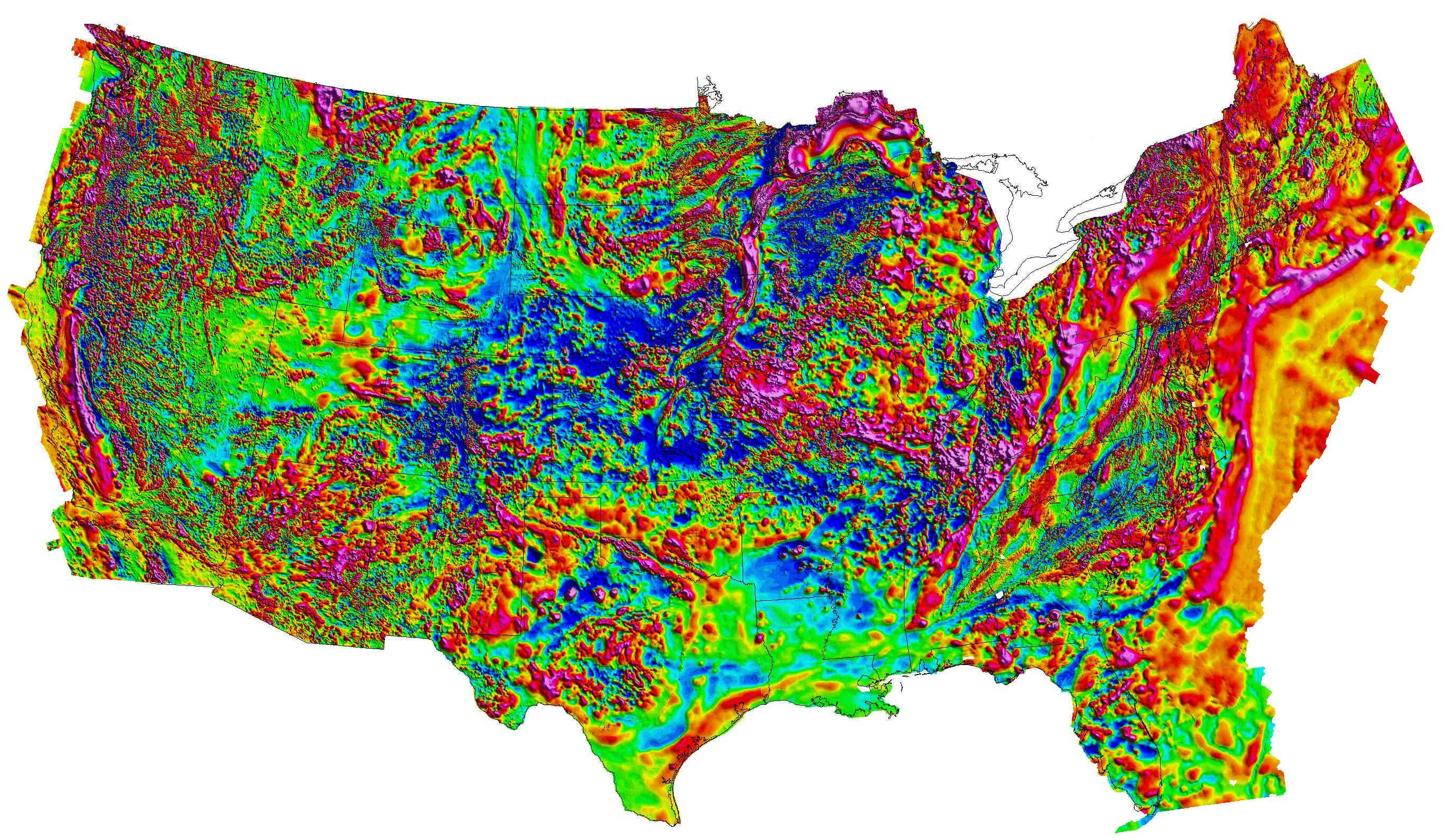
1 000 000 nT
Range \(\pm\) 500 nT
Resolution \(\sim\) 1 nT https://mrdata.usgs.gov/magnetic/ (Bankey et al. 2002)
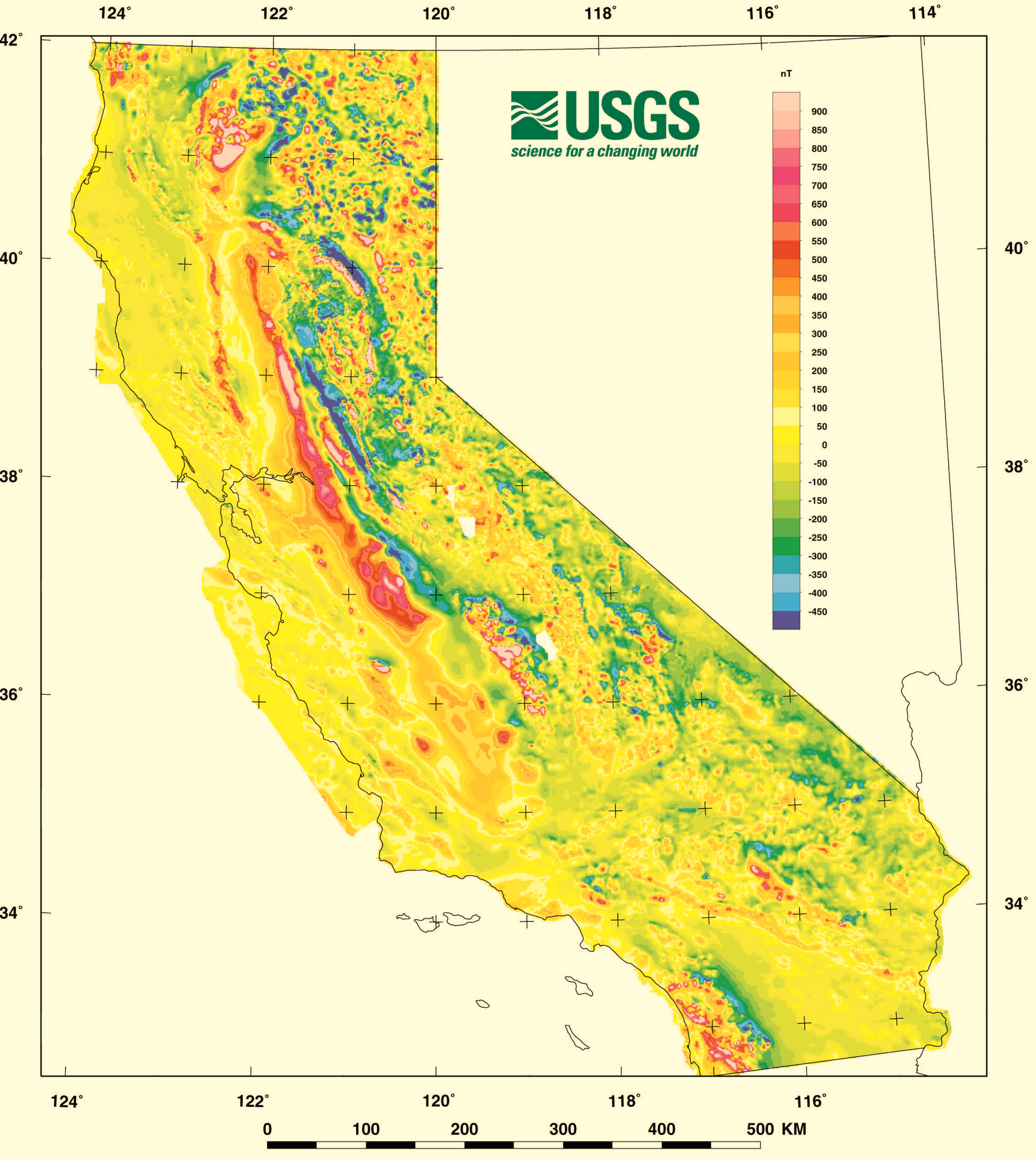
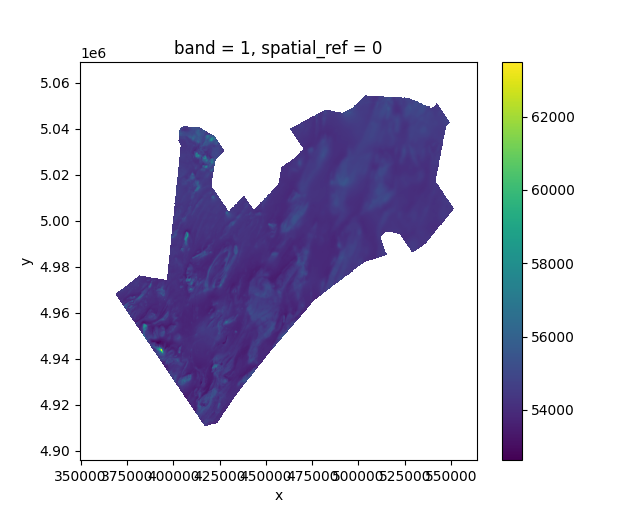
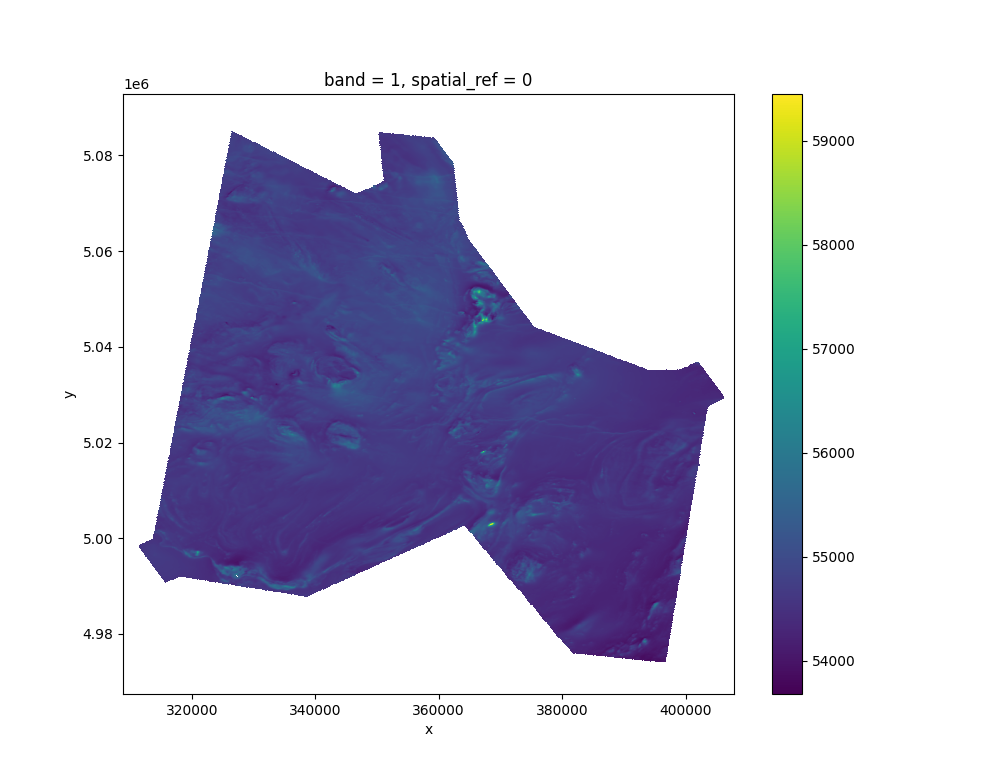
Map-based navigation
- Features are required to navigate
- Magnetic anomaly closely tied to geology
- less variation in coastal region
- direction variation in Central Valley
- more structure in Sierra Nevada mountains
- Area and direction of travel make a difference
(Roberts and Jachens 2000)
Earth Magnetic Anomaly Grid 2-arcsec v3
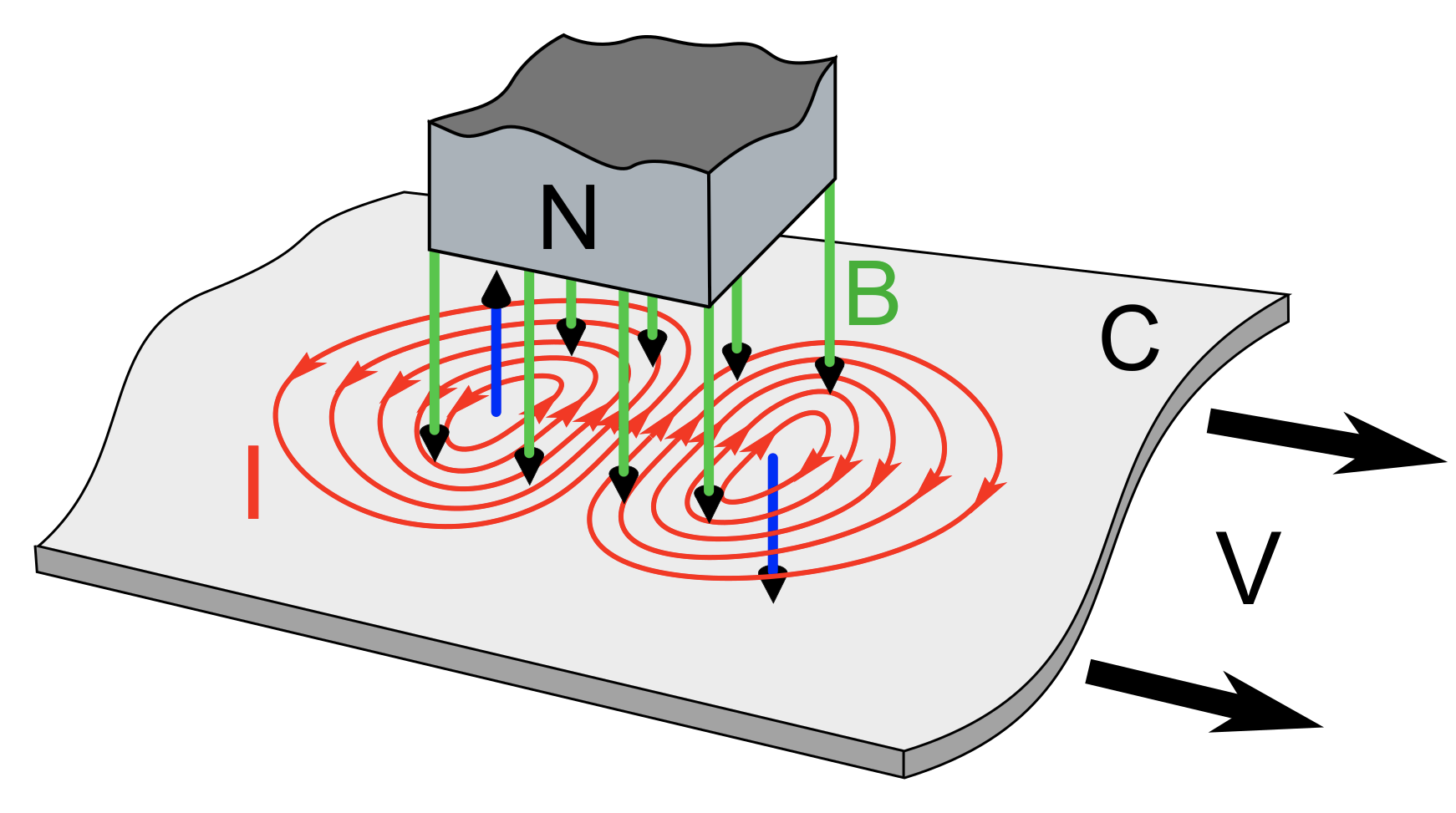
An airplane is a big magnet that flies

\(|\vec{B}| = |\vec{B}_\text{earth} + \vec{B}_\text{anomaly} + \vec{B}_\text{plane}|\)
Aircraft Calibration
Sensor placement and installation
- Engineered location
- Stinger
- Survey for placement
- Non-magnetic fasteners
Degaussing
Algorithms

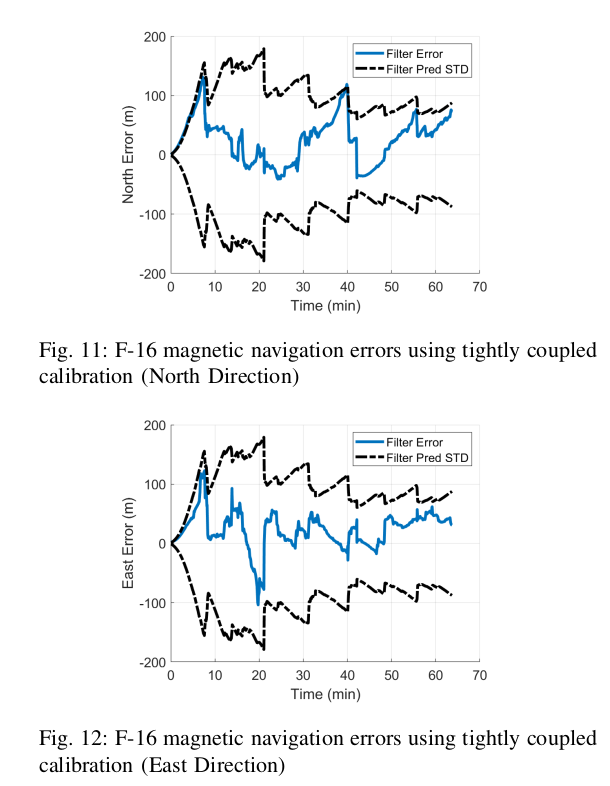
Published F-16 results


F-16 photos approved for public release by Edwards AFB Public Affairs Office. Public Release number 20438.
Standard calibration model - Tolles-Lawson
\[|\vec{B}| = |\vec{B}_\text{ext} + \vec{B}_\text{plane}|\]
\[ \begin{array}{ l B c B c B c } \vec{B}_\mathrm{Plane} & = & \vec{B}_\mathrm{Permanent} & + & \vec{B}_\mathrm{Induced} & + & \vec{B}_\mathrm{Eddy}\\ & = & \vec{P}_\mathrm{constant} {} & + &{} M_{3\times3} \vec{B }_\mathrm{Earth} {} & + & {} S_{3\times3} \frac{\partial}{\partial t} \vec{B}_\mathrm{Earth} \end{array} \]
\(M_{3\times3}\) is symmetric \(\rightarrow\) 6 independent elements
Total of 18 independent elements
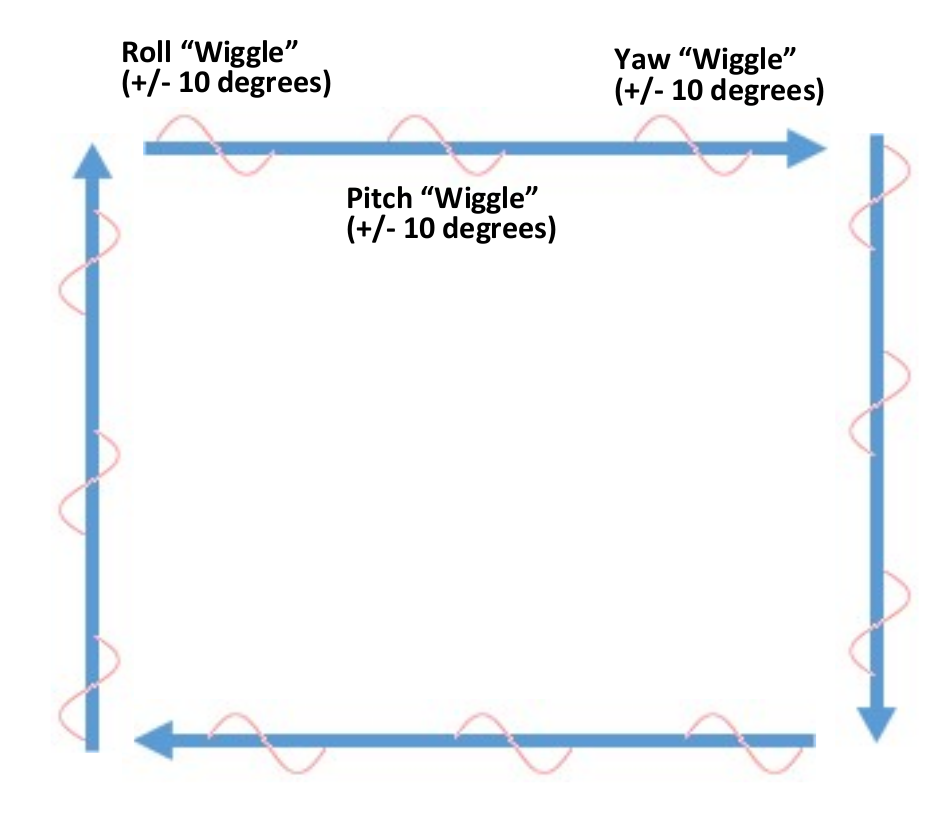
Calibration manuevers - Tolles-Lawson
Fly the aircraft in a series of Roll, Pitch, Yaw maneuvers
High-altitude
Altitude of a known map
Maneuver angle should depend upon the expected aircraft dynamics
- Barrel Rolls?
Typically at each cardinal heading
- 3 rolls \(\pm 10^\circ\) at 1 Hz
- 3 pitches \(\pm 10^\circ\) at 1 Hz
- 3 yaws \(\pm 10^\circ\) at 1 Hz
(W. E. Tolles and Lawson 1950), (W. E. Tolles 1954), (W. E. Tolles 1955), (A. Gnadt 2022)
DAF-MIT AI Accelerator MagNav project
![]()
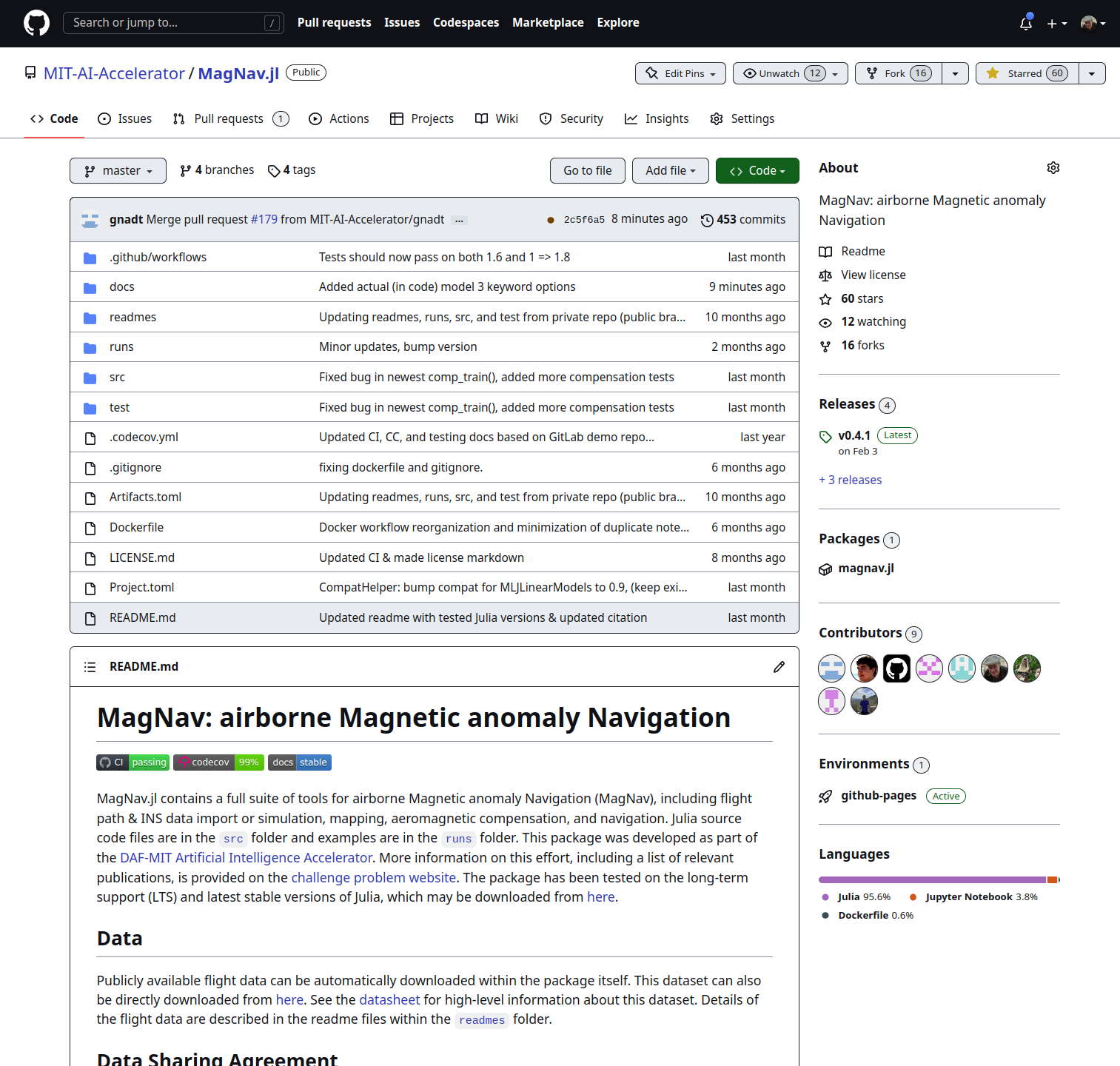
Public Software and Data for MagNav
Collected data and made publicly available:
Created software suite published on GitHub:
- Written in Julia https://juilalang.org
- https://github.com/MIT-AI-Accelerator/MagNav.jl
- Docker container https://hub.docker.com/r/jtaylormit/magnav
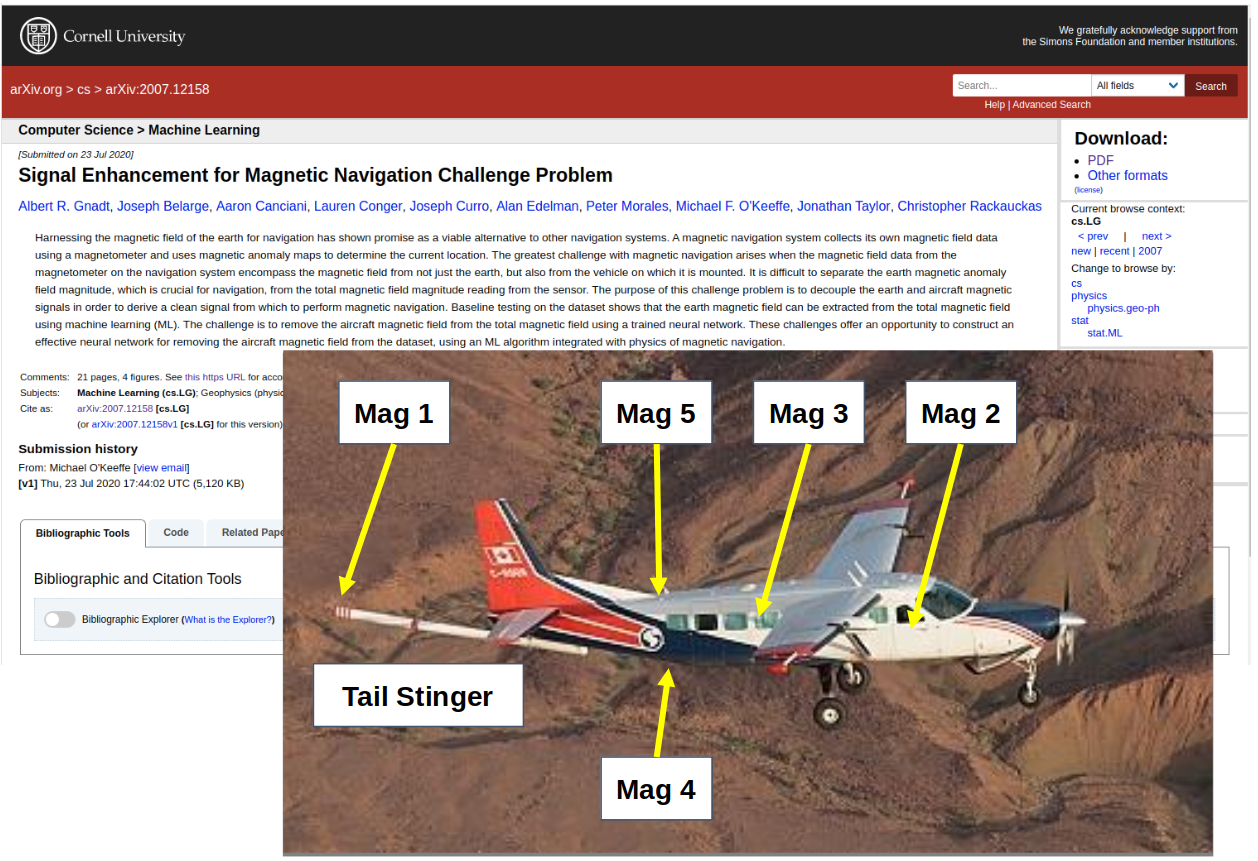
Data run-thru
- Collected data made publicly available:
- https://zenodo.org/record/6327685
- Hold-out data for challenge problem
- Recorded flight data near Ottawa, ON
- Position, velocity, attitude (truth)
- Tail Stinger
- 4 magnetometers in cabin
- Current and voltage sensors
- 10 Hz
- Ground station reference sensor
- 10 Hz
- Magnetic Maps of flight area
- Calibration maneuvers
- Flight crew notes
- Power lines
- Railroad tracks
- On-board activities
- power on/off to systems
- movement of iron bars
- Professional calibration results
MagNav Software - MagNav.jl
https://github.com/MIT-AI-Accelerator/MagNav.jl
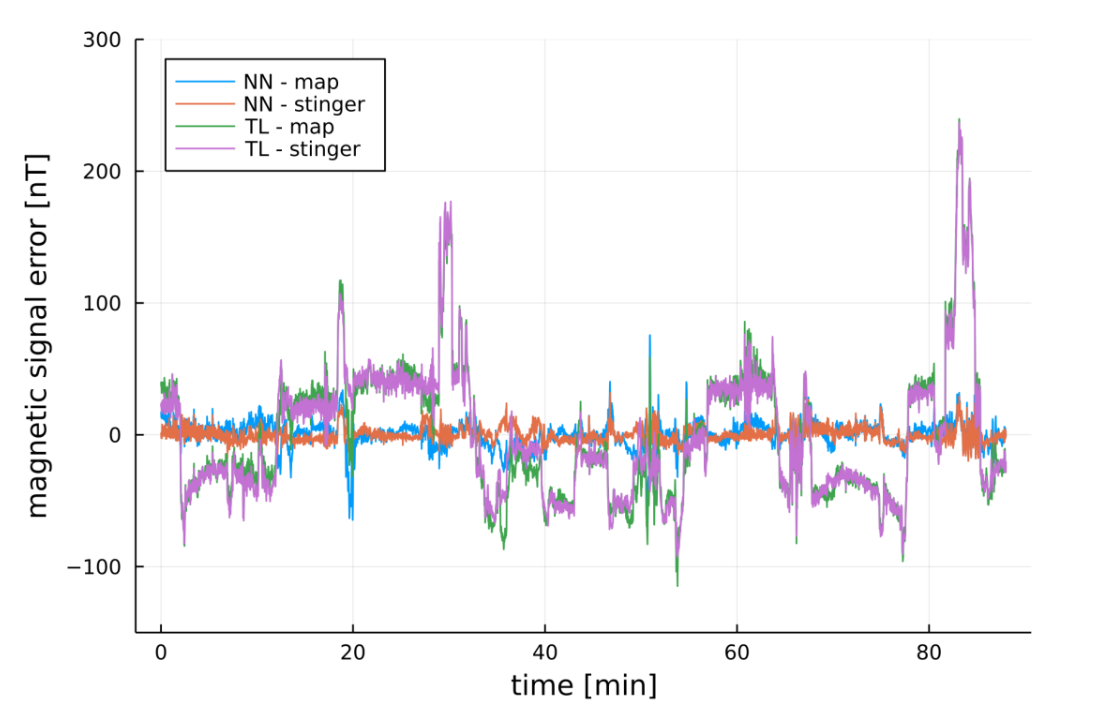
MagNav.jl performance
Software package includes
- Standard Tolles-Lawson
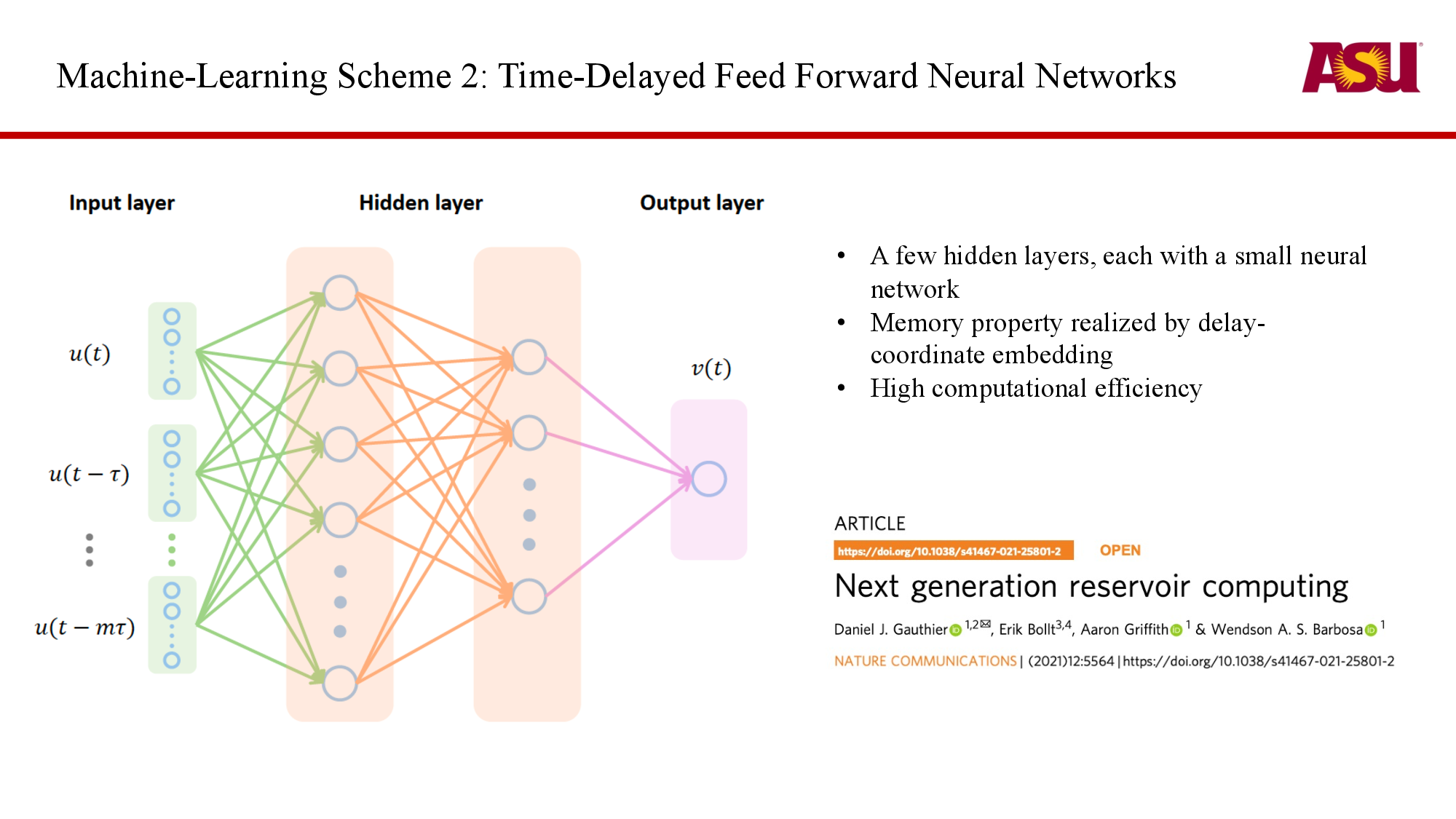
- Neural network calibration options
Best in-cabin NN magnetometer performance: \(\sigma=6.32\ \text{nT}\)
Challenge problem
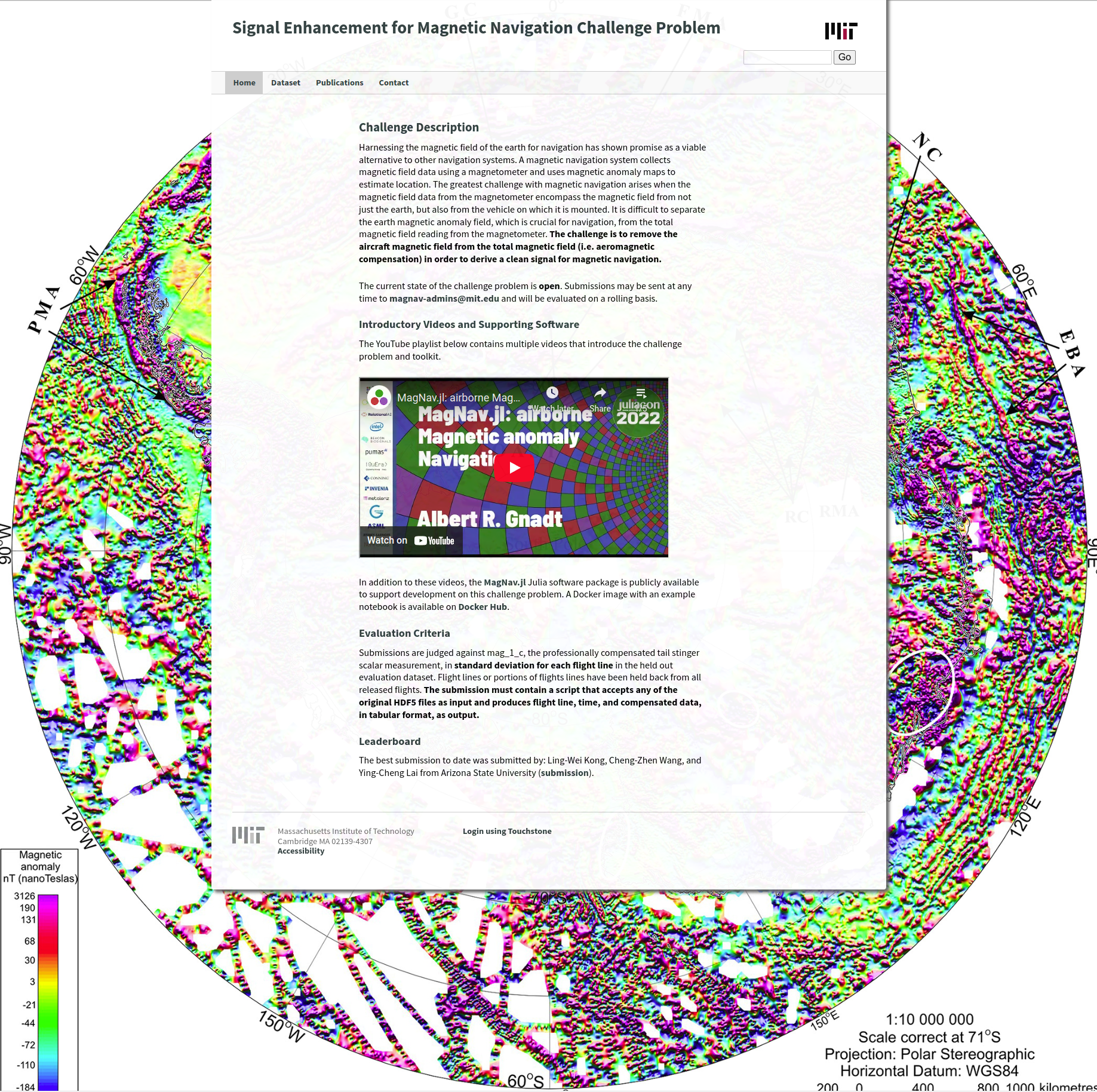
Challenge problem
Arizona State Univ. solution
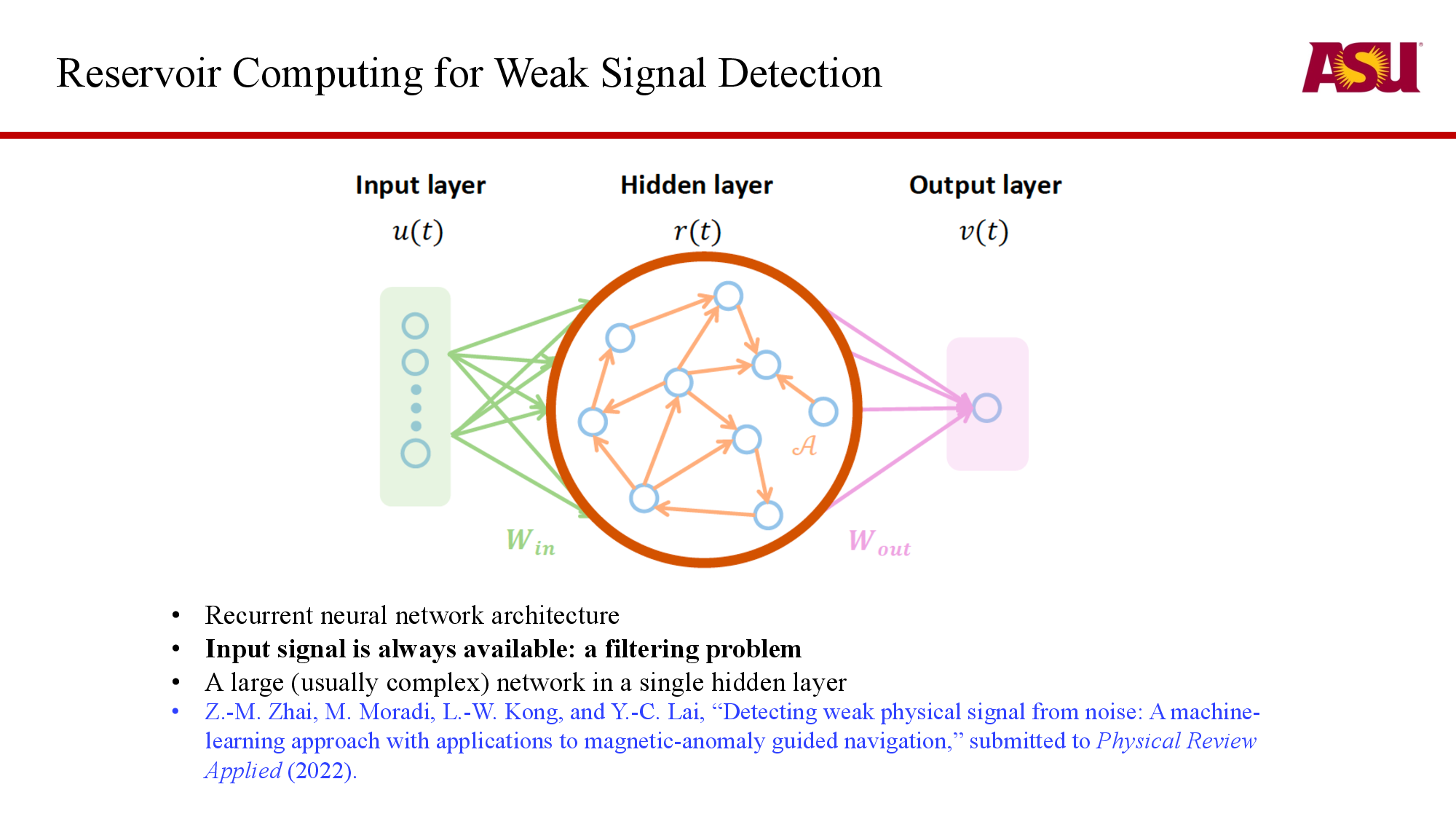
ASU approaches
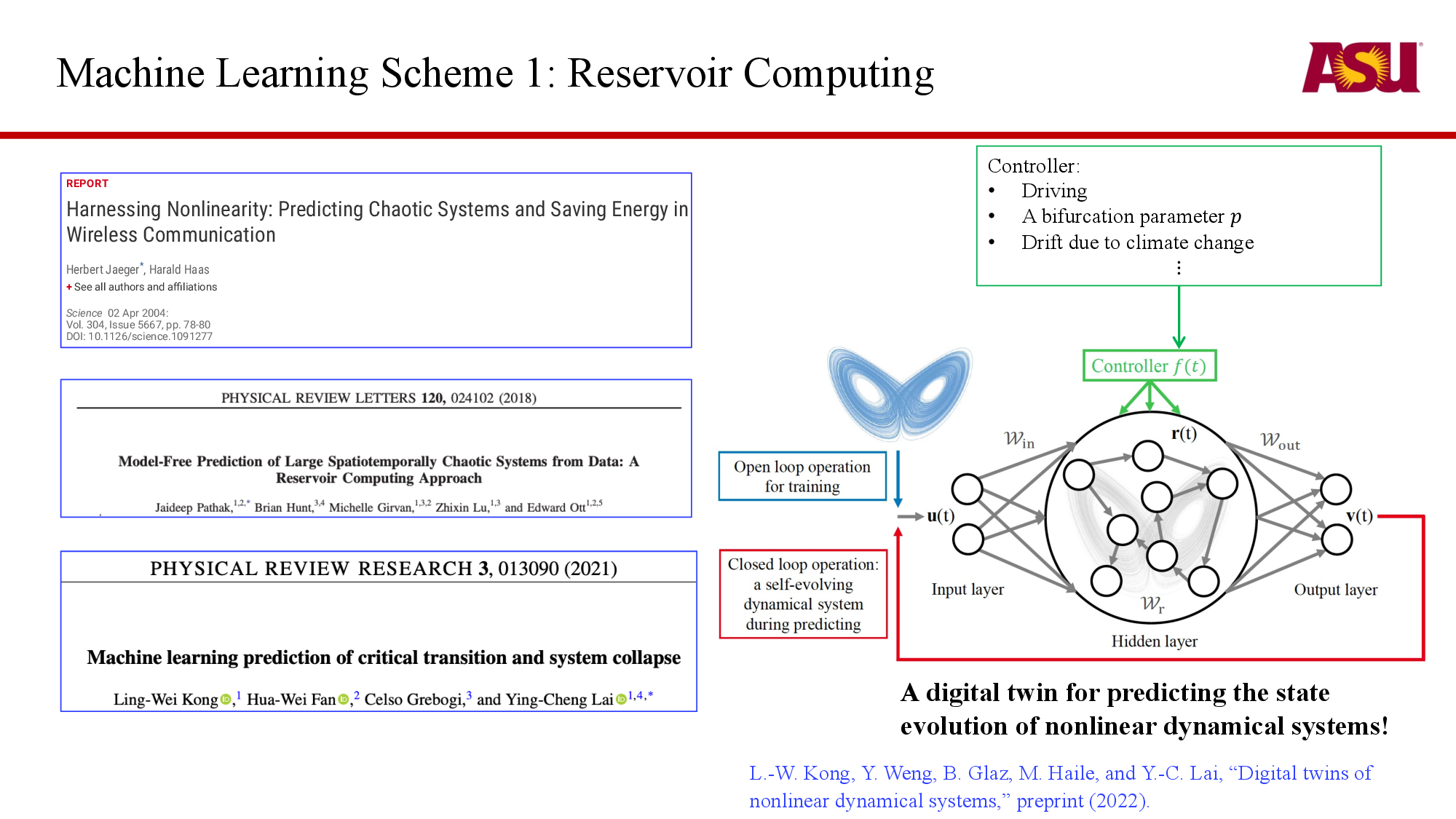
ASU approaches
ASU results
\(\sigma\approx\ 4\ \text{nT}\)
Future areas for research - maps
- Fill gaps in existing data
- Existing data is low resolution (\(\approx\) 4 km)

Future areas for research - calibration
- Update with payload changes
- Transfer from one vehicle to another
https://www.usgs.gov/media/images/cessna-208b-grand-caravan-1
Thanks
![]()

![]()
Contact informaton
Aaron Nielsen, Ph.D.
Autonomy and Navigation Technology Center
Air Force Institute of Technology
Wright-Patterson, AFB, OH
https://www.afit.edu
https://www.afit.edu/ANT
aaron.nielsen.2@au.af.edu

![]()
References
