Tolles-Lawson Compensation
IEEE/ION PLANS 2023, Monterey, CA
The views expressed in this article are those of the author and do not necessarily reflect the official policy or position of the United States Government, Department of Defense, United States Air Force or Air University.
Distribution A: Authorized for public release. Distribution is unlimited. Case No. 2023-0277.
Tolles-Lawson
- Calibration technique developed in WW2 for submarine hunting
- Declassified in 1950’s and patented
- Standard calibration technique used for aero-magnetic surveys
- Developed by (Leliak 1961)

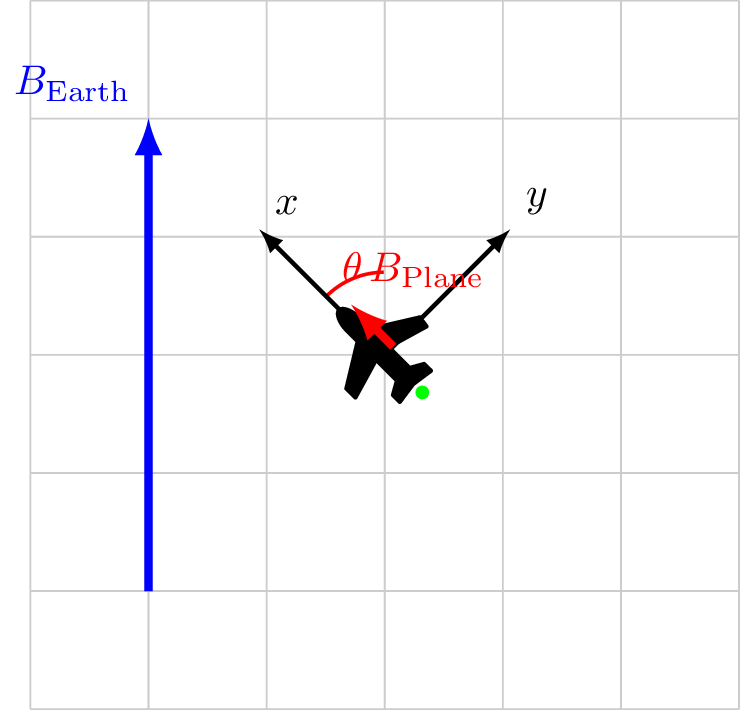
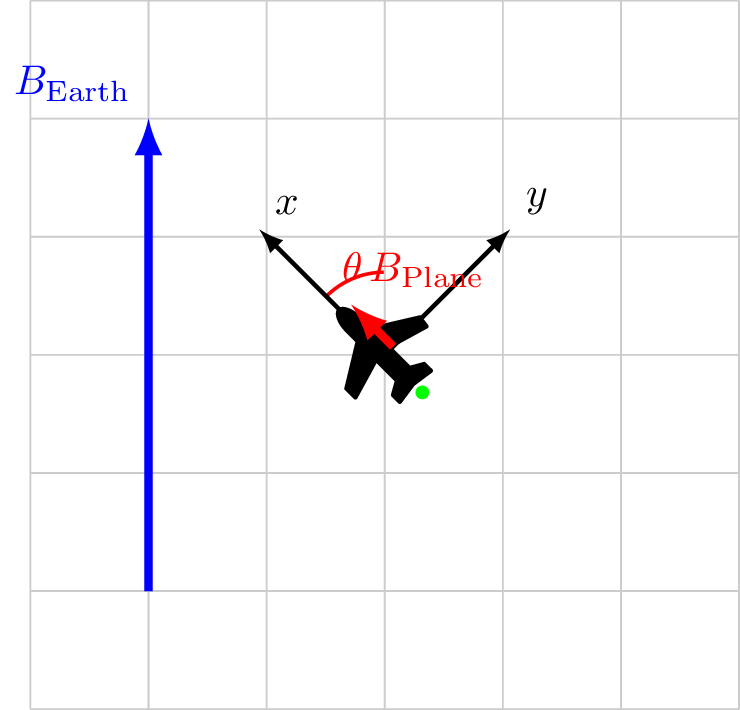
\[ \begin{align*} |B_\mathrm{Sensor}| &= |\vec{B}_\ext + \vec{B}_\faPlane|\\ &= \sqrt{ |B_\ext|^2 + |B_\faPlane|^2 + 2 |B_\ext||B_\faPlane|\cos\theta}\\ |B_\text{Sensor}| &= |B_\ext| \sqrt{ 1 + \frac{|B_\faPlane|^2}{|B_\ext|^2} + 2\frac{|B_\faPlane|}{|B_\ext|}\cos\theta} \end{align*} \]
Tolles-Lawson Path to Calibration 1/2
\[
\begin{align*}
|B_\text{Sensor}| &= |\vec{B}_\ext + \vec{B}_\faPlane|\\
&= \sqrt{ |B_\ext|^2 + |B_\faPlane|^2 + 2 |B_\ext||B_\faPlane|\cos\theta}\\
|B_\text{Sensor}| &= |B_\ext| \sqrt{ 1 + 2\frac{|B_\faPlane|}{|B_\ext|}\cos\theta}\\
&\approx |B_\ext| + |B_\faPlane|\cos\theta + \cdots
\end{align*}
\]
Path to Calibration
Measure \(\cos\theta\)
Solve \(|B_\text{sensor}| = |B_\ext| + |B_\plane|\cos\theta\)
Assuming \(|B_\ext|\) is known or constant
Tolles-Lawson Path to Calibration 2/2
Path to Calibration
Measure \(\cos\theta\)
Solve \(|B_\text{sensor}| = |B_\ext| + |B_\faPlane|\cos\theta\)
Assuming \(|B_\ext|\) is known or constant
How to measure \(\cos\theta\)?
Use a vector magnetometer
Rotate aircraft in \(|B_\ext|\)
Compute direction cosines…
Calibration 1/4
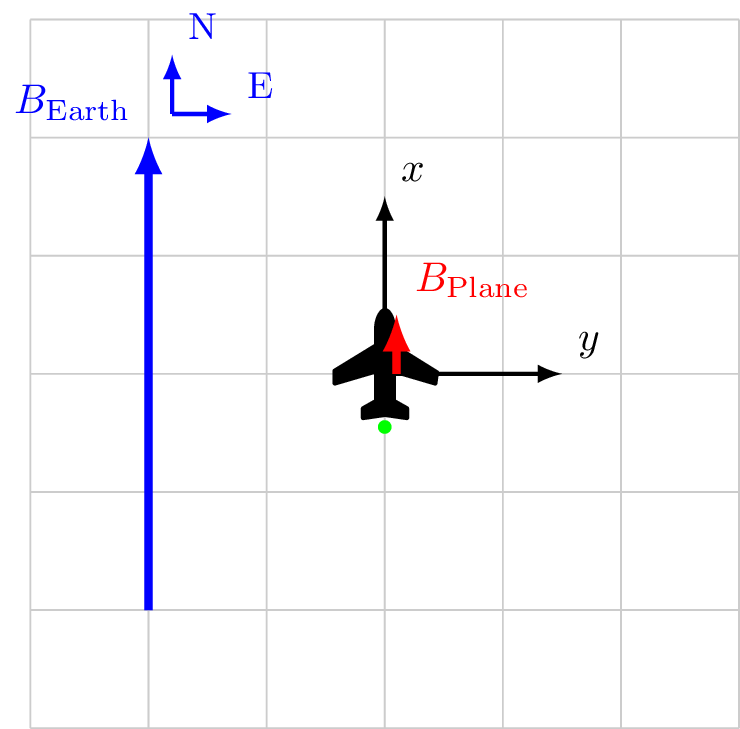
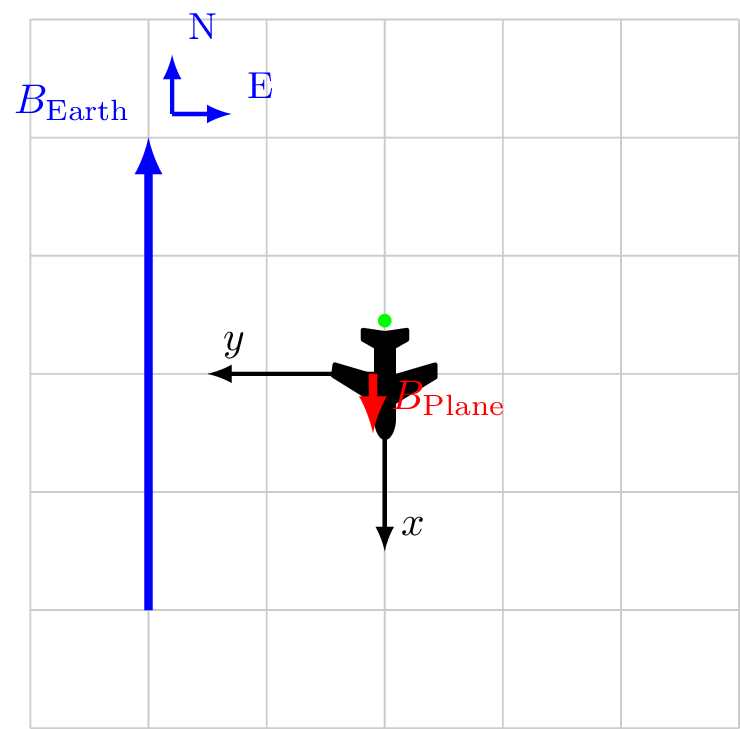
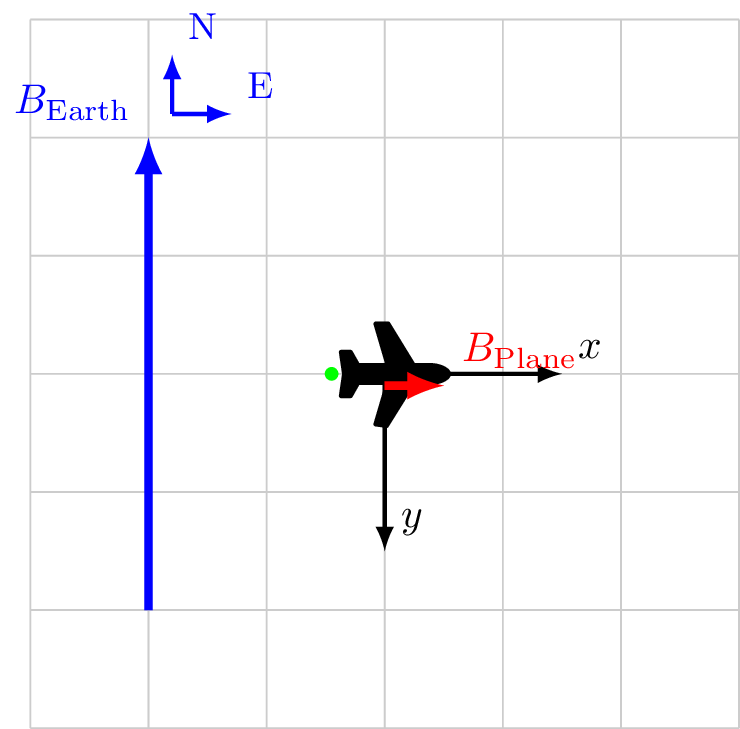
Coordinate system fixed to aircraft
\[\vec{B}_\mathrm{Sensor} = \vec{B}_\ext + \vec{B}_\faPlane\]
\[
\begin{alignat*}{3}
\vec{B}_\ext &= 4.0 \hat{x} && + 0.0 \hat{y} \\
\vec{B}_\faPlane &= 0.5 \hat{x} && +0.0 \hat{y} \\
\vec{B}_\text{Sensor} &= 4.5 \hat{x} && + 0.0 \hat{y} \\
|B_\text{Sensor}| &= 4.5 && \\
\cos X &= \frac{4.5}{4.5} && = 1\\
\cos Y &= \frac{0.0}{4.5} && = 0\\
\end{alignat*}
\]
Calibration 2/4
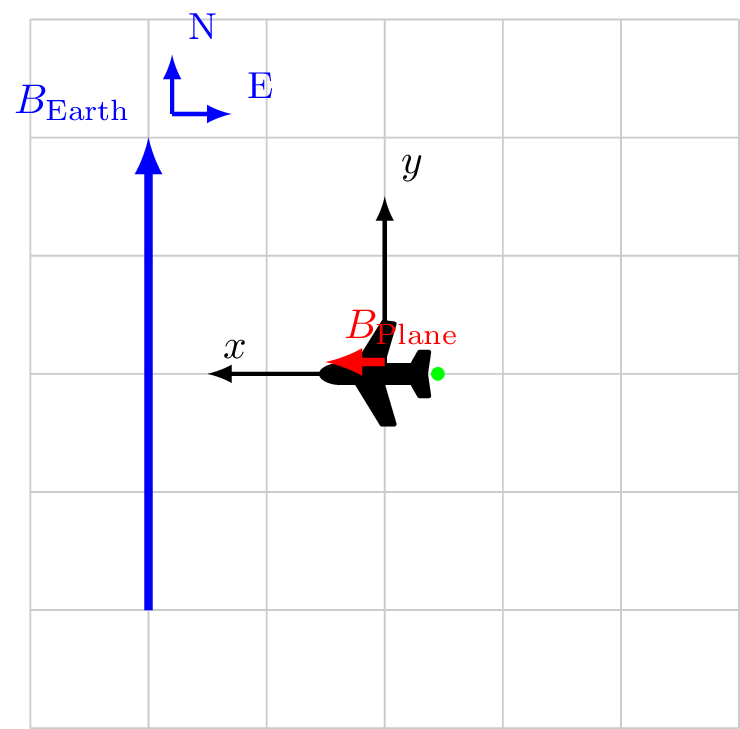
Coordinate system fixed to aircraft
\[\vec{B}_\text{Sensor} = \vec{B}_\ext + \vec{B}_\faPlane\]
\[
\begin{alignat*}{3}
\vec{B}_\ext &= 0.0 \hat{x} && + 4.0 \hat{y} \\
\vec{B}_\faPlane &= 0.5 \hat{x} && + 0.0 \hat{y} \\
\vec{B}_\text{Sensor} &= 0.5 \hat{x} && + 4.0 \hat{y} \\
|B_\text{Sensor}| &= 4.007 && \\
\cos X &= \frac{0.5}{4.007} && \ne 0 \rightarrow 82.8^\circ\\
\cos Y &= \frac{4.0}{4.007} && \approx 1\\
\end{alignat*}
\]
Calibration 3/4
Coordinate system fixed to aircraft
\[\vec{B}_\text{Sensor} = \vec{B}_\ext + \vec{B}_\faPlane\]
\[
\begin{alignat*}{3}
\vec{B}_\ext &= -4.0 \hat{x} && + 0.0 \hat{y} \\
\vec{B}_\faPlane &= 0.5 \hat{x} && + 0.0 \hat{y} \\
\vec{B}_\text{Sensor} &= -3.5 \hat{x} && + 0.0 \hat{y} \\
|B_\text{Sensor}| &= 3.5 && \\
\cos X &= \frac{-3.5}{3.5} && = -1\\
\cos Y &= \frac{0}{3.5} && = 0\\
\end{alignat*}
\]
Calibration 4/4
Coordinate system fixed to aircraft
\[\vec{B}_\text{Sensor} = \vec{B}_\ext + \vec{B}_\faPlane\]
\[
\begin{alignat*}{3}
\vec{B}_\ext &= 0.0 \hat{x} && + -4.0 \hat{y} \\
\vec{B}_\faPlane &= 0.5 \hat{x} && + 0.0 \hat{y} \\
\vec{B}_\text{Sensor} &= 0.5 \hat{x} && + -4.0 \hat{y} \\
|B_\text{Sensor}| &= 4.007 &&\\
\cos X &= \frac{0.5}{4.007} && \ne 0\\
\cos Y &= \frac{-4.0}{4.007} && \approx -1\\
\end{alignat*}
\]
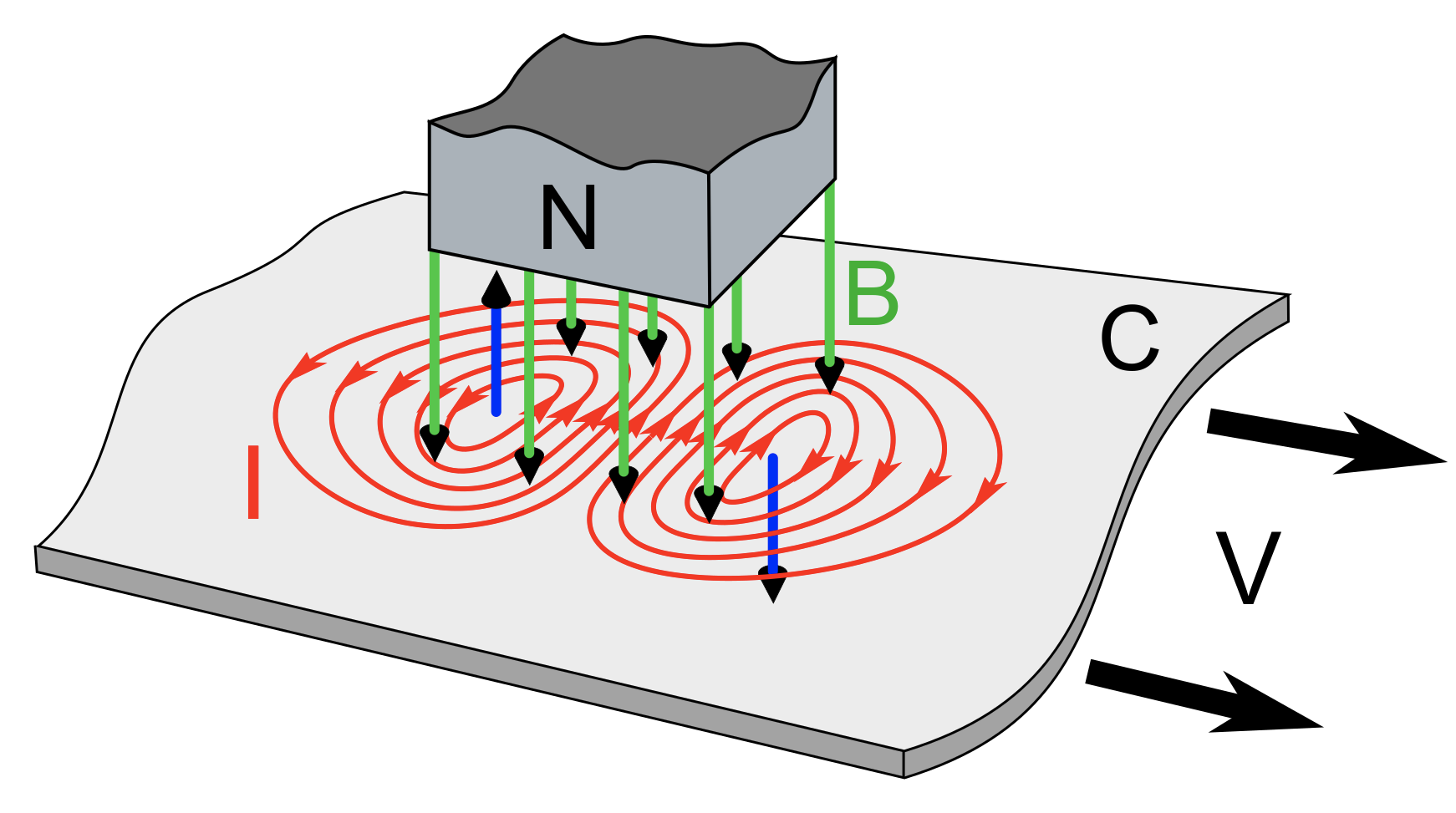
Standard calibration model
\[|\vec{B}| = |\vec{B}_\ext + \vec{B}_\faPlane|\]
\[ \begin{array}{ l B c B c B c } \vec{B}_\faPlane & = & \vec{B}_\text{Permanent} & + & \vec{B}_\text{Induced} & + & \vec{B}_\text{Eddy}\\ & = & \vec{P}_\text{constant} {} & + &{} M_{3\times3} \vec{B }_\ext {} & + & {} S_{3\times3} \frac{\partial}{\partial t} \vec{B}_\ext \end{array} \]
\(M_{3\times3}\) is symmetric \(\rightarrow\) 6 independent elements
Total of 18 elements
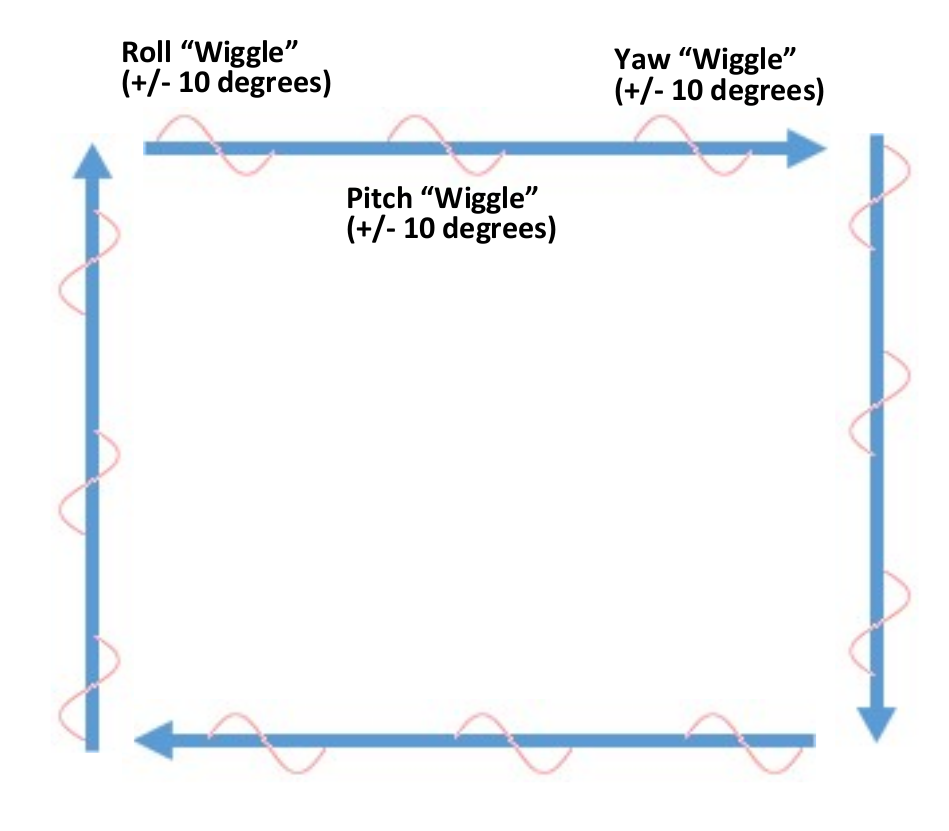
Calibration manuevers - Tolles-Lawson
Fly the aircraft in a series of Roll, Pitch, Yaw maneuvers
High-altitude
Altitude of a known map
Maneuver angle should depend upon the expected aircraft dynamics
- Barrel Rolls?
Typically at each cardinal heading
- 3 rolls \(\pm 10^\circ\) at 1 Hz
- 3 pitches \(\pm 10^\circ\) at 1 Hz
- 3 yaws \(\pm 10^\circ\) at 1 Hz
Pack your air-sickness bag
(W. E. Tolles and Lawson 1950), (W. E. Tolles 1954), (W. E. Tolles 1955), (Gnadt, Wollaber, and Nielsen 2022)
Apply \(c\) to in-flight data for comparison
In-flight
Compute \(A_i\) for each time-step
Apply \(c\)
\[
B_\text{plane} = A c
\]
\[
B_\text{anomaly} = B_\text{sensor} - B_\earth - B_\faPlane
\]
