
Workshop Presentation Materials
ION MagNav Workshop 2023, Monterey, CA
The views expressed in this article are those of the author and do not necessarily reflect the official policy or position of the United States Government, Department of Defense, United States Air Force or Air University.
Distribution A: Authorized for public release. Distribution is unlimited. Case No. 2023-0427.
Magnetic Anomaly Navigation Overview
https://rpubs.com/friendly/test-newcommands https://quarto.org/docs/authoring/markdown-basics.html#equations
https://stackoverflow.com/questions/41362012/how-to-insert-font-awesome-icons-in-mathjax
Font-Awesome will only work for html type output
$$$$
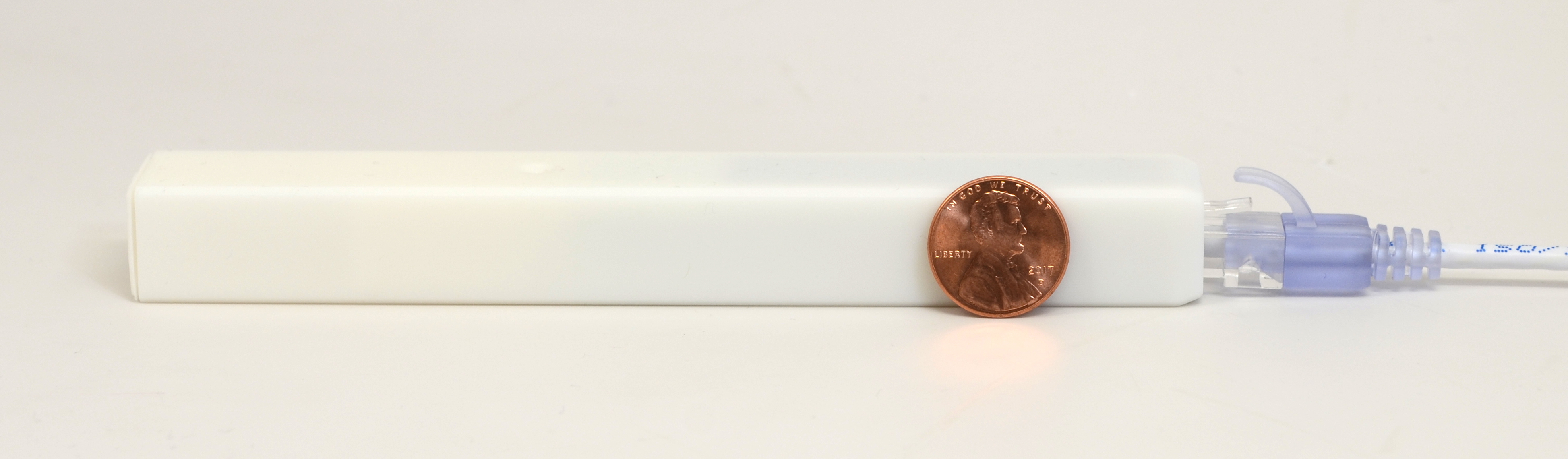
Refrigerator magnet 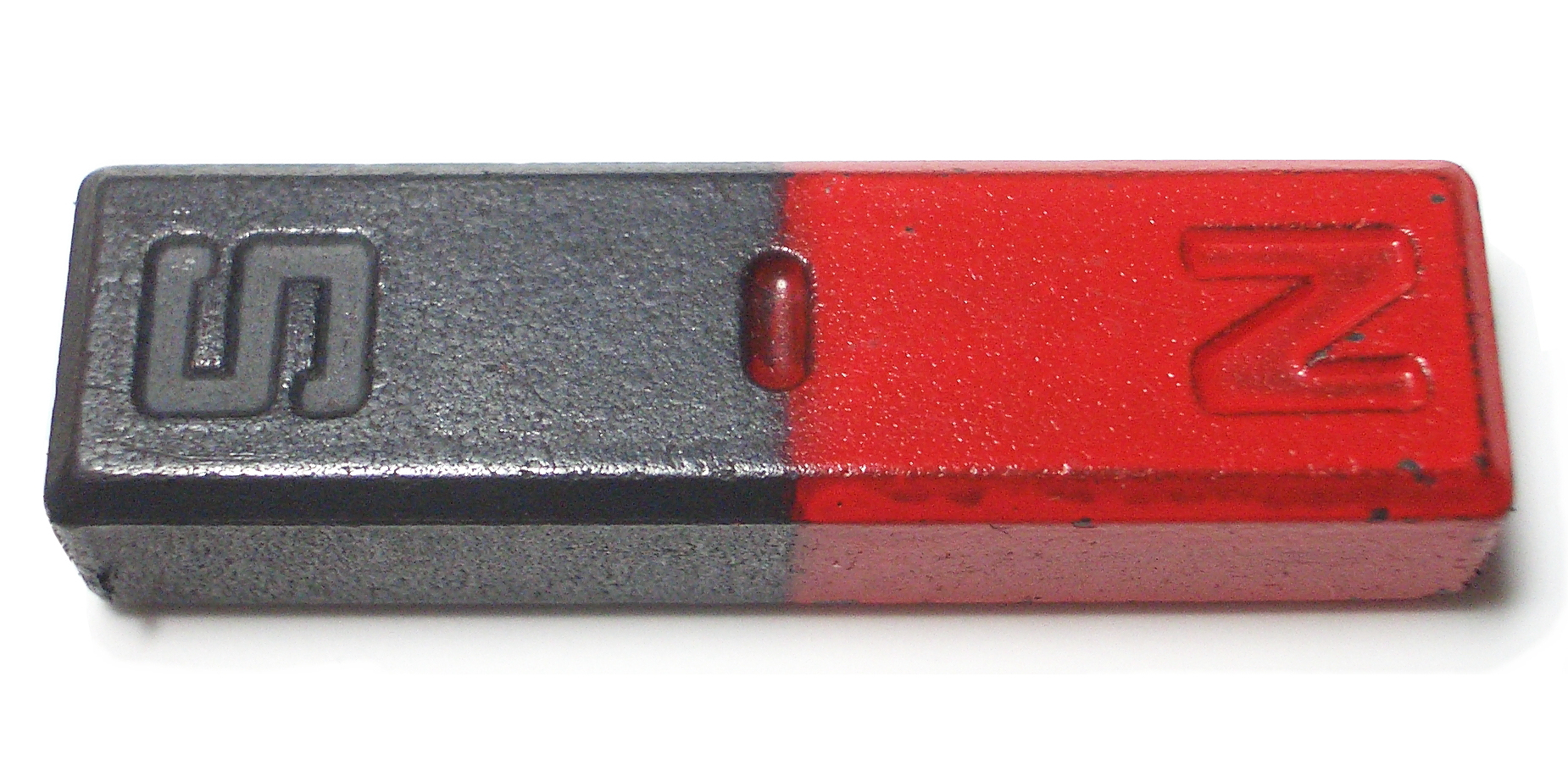
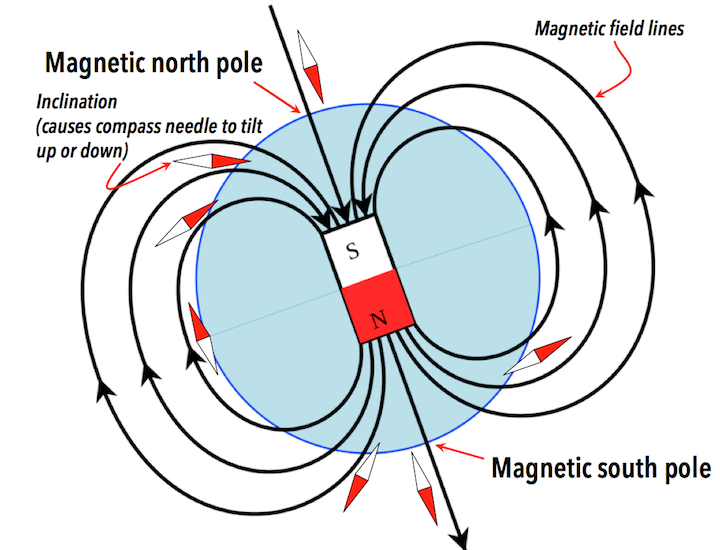
Earth’s core field (compass) 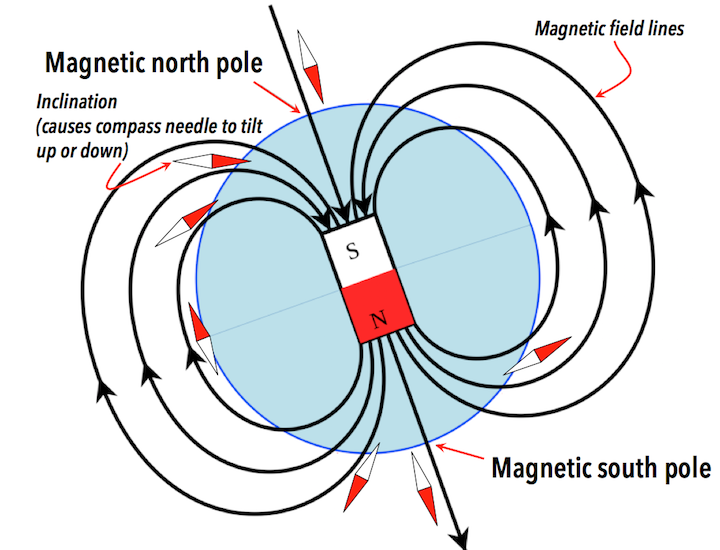
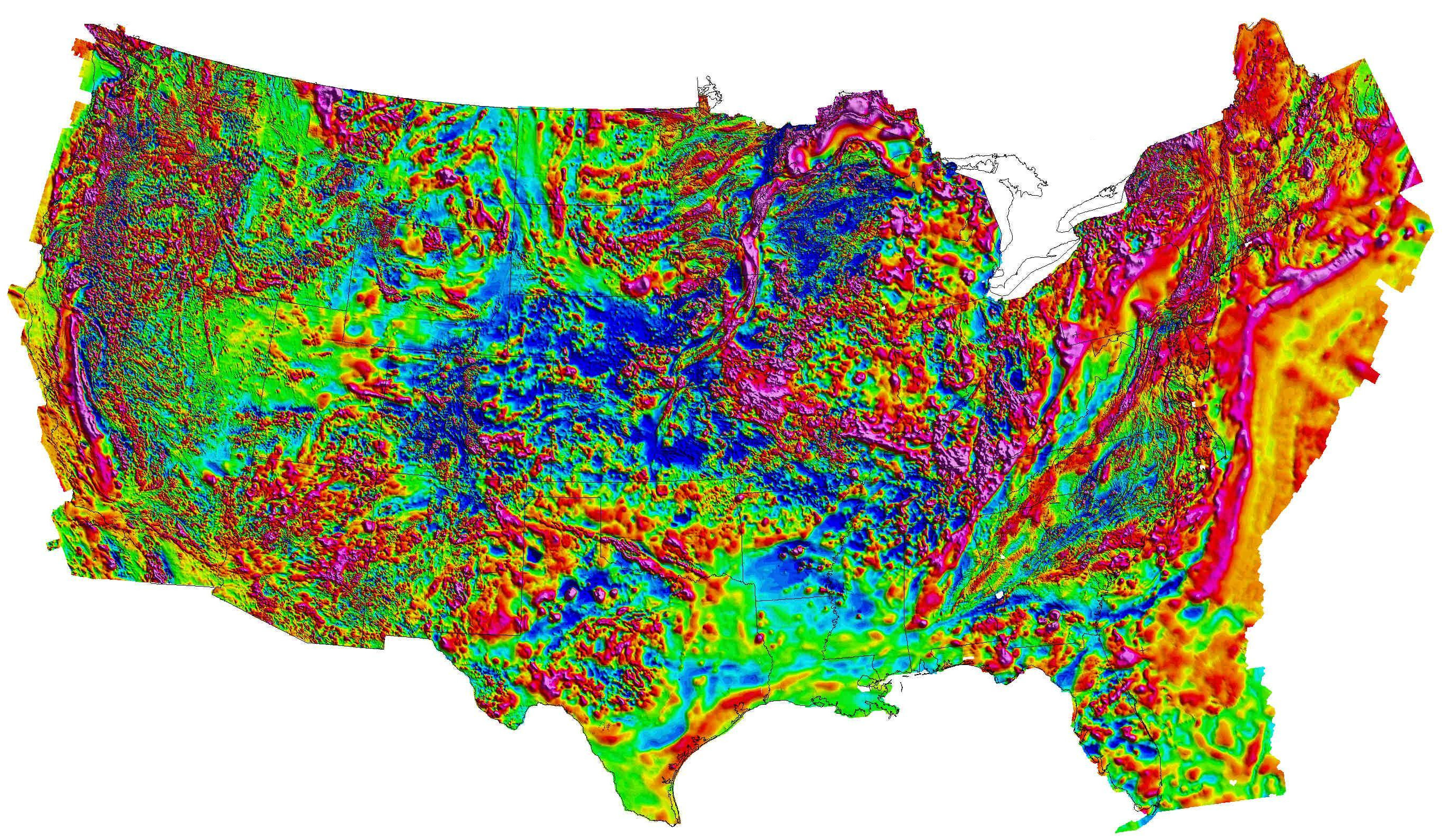
Crustal magnetic anomaly 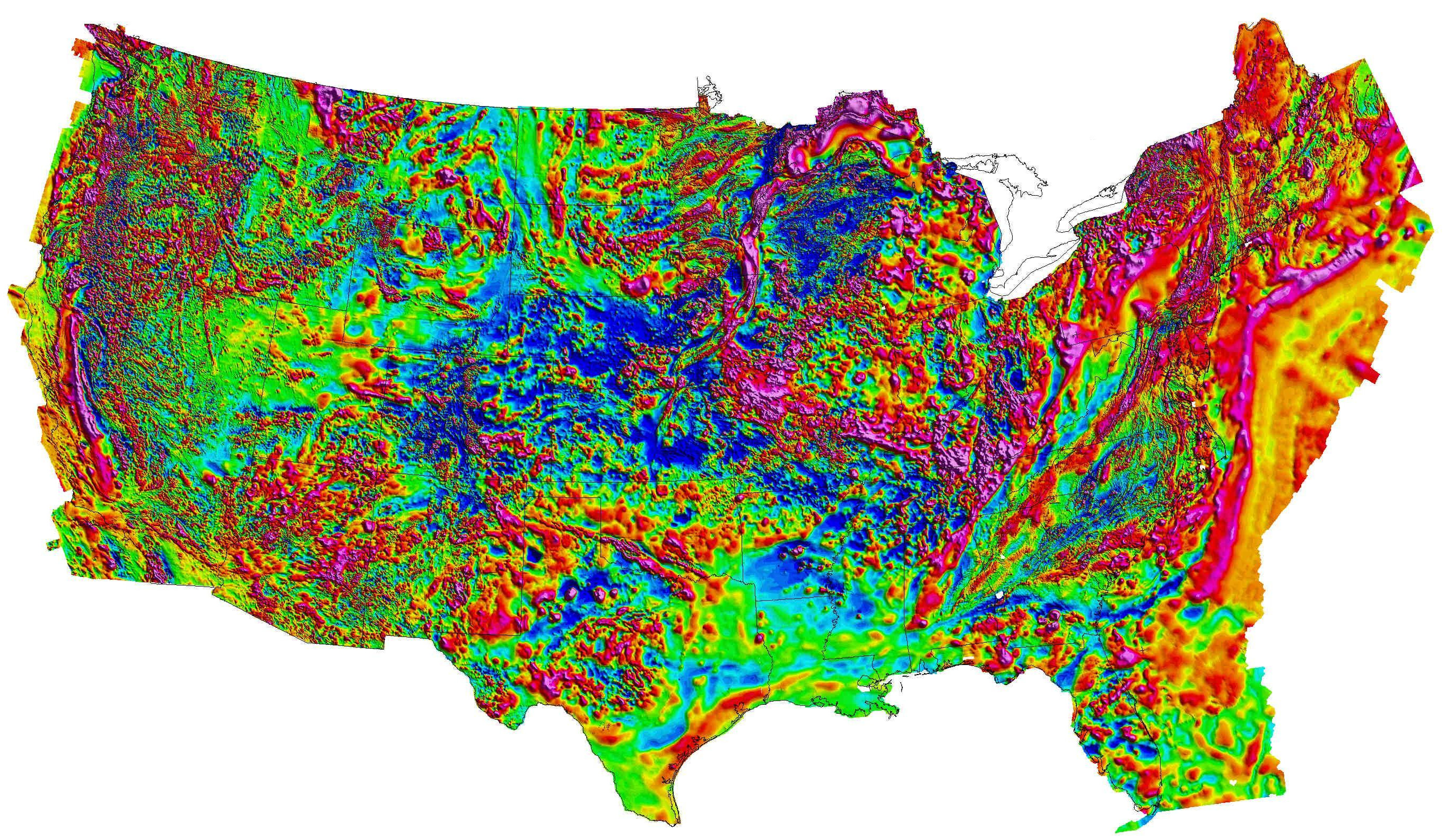
1 000 000 nT
Range \(\pm\) 500 nT
Resolution \(\sim\) 1 nT https://mrdata.usgs.gov/magnetic/ (Bankey et al. 2002)
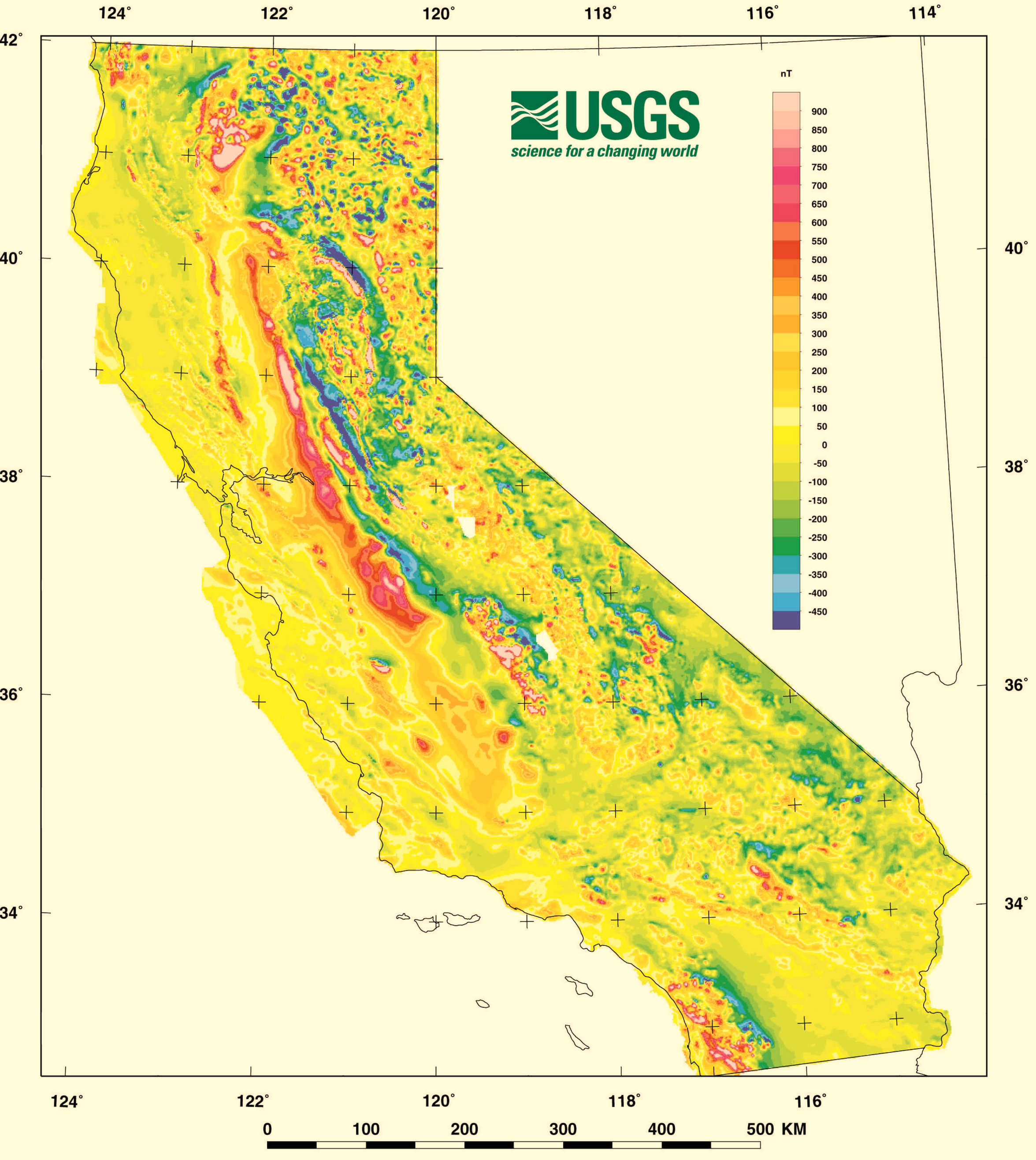
Map-based navigation
- Features are required to navigate
- Magnetic anomaly closely tied to geology
- less variation in coastal region
- direction variation in Central Valley
- more structure in Sierra Nevada mountains
- Area and direction of travel make a difference
(Roberts and Jachens 2000)
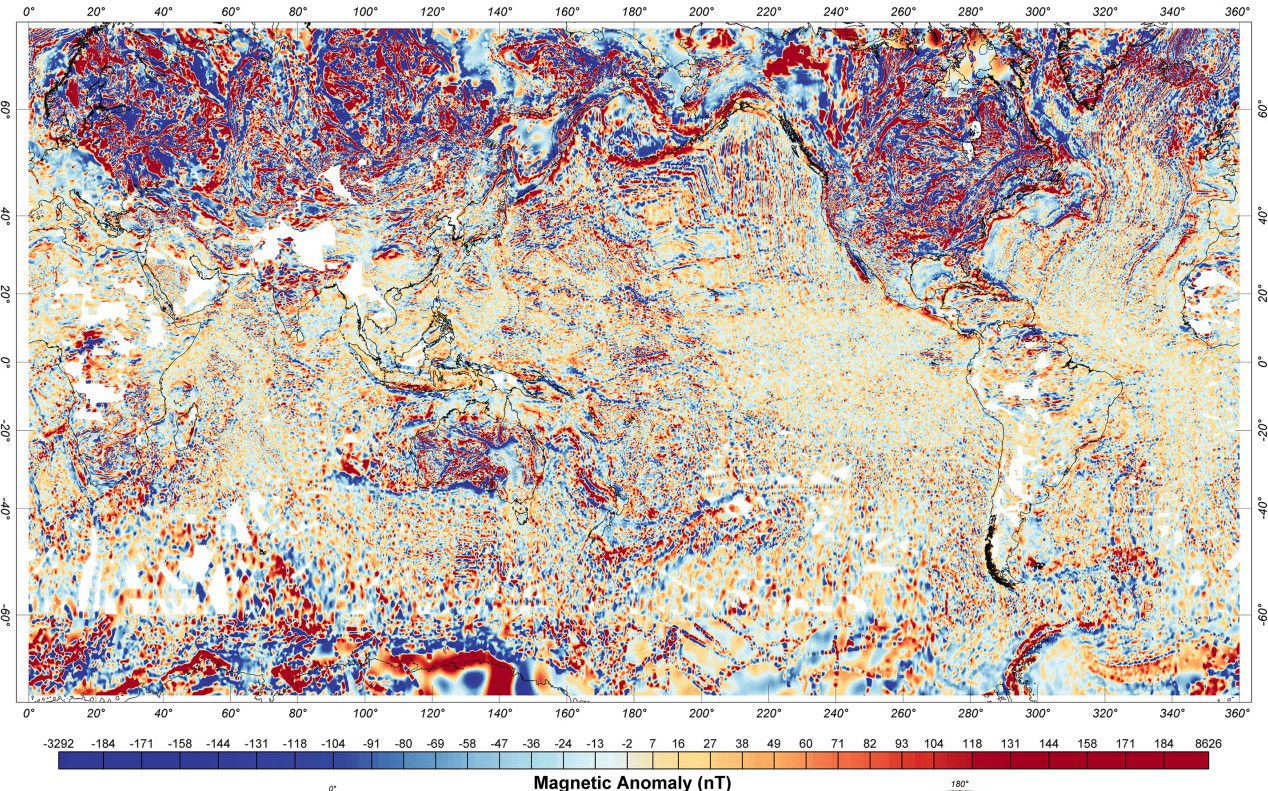
Map coverage required - Earth Magnetic Anomaly Grid 2-arcsec v3
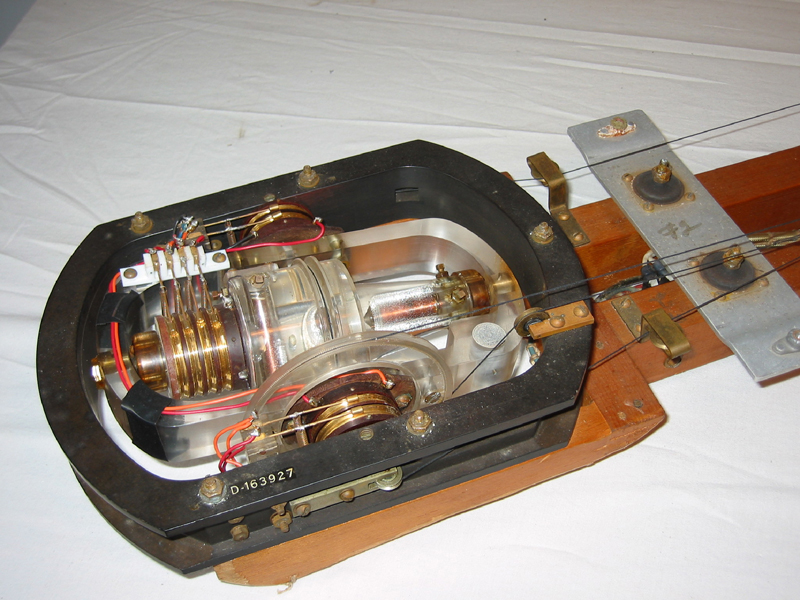
Sensors

Vaquier towed magnetometer, National Museum of American History (Smithsonian Institution, n.d.) Ca. 1946
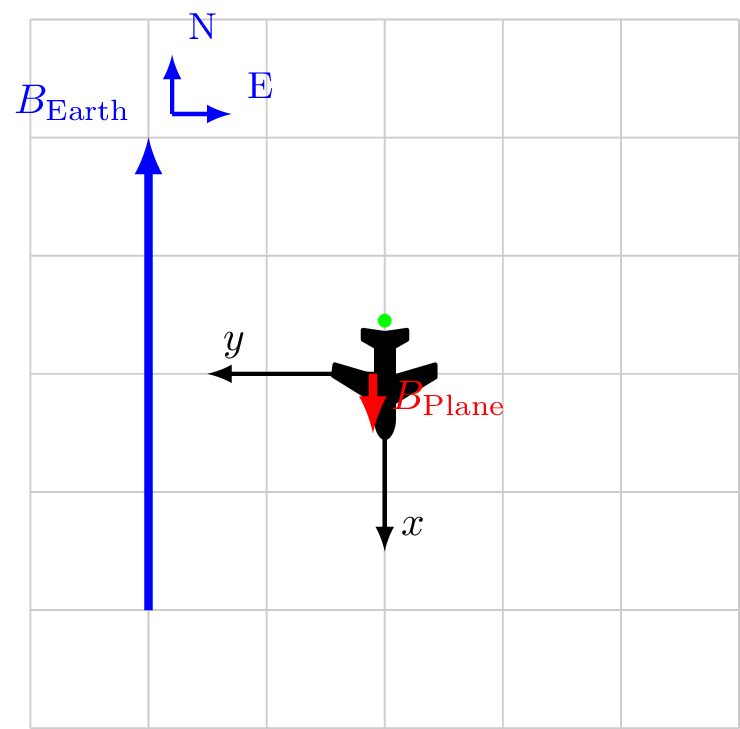
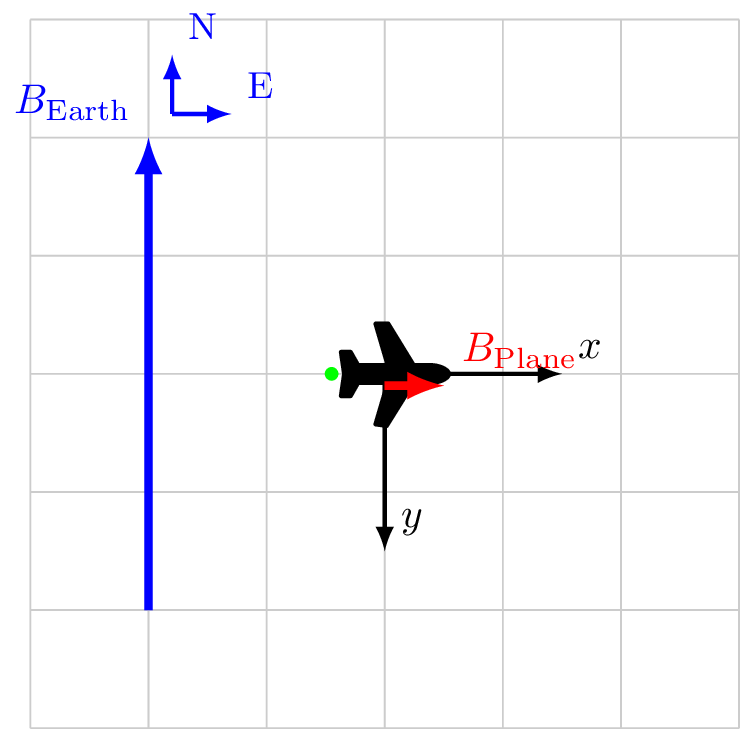
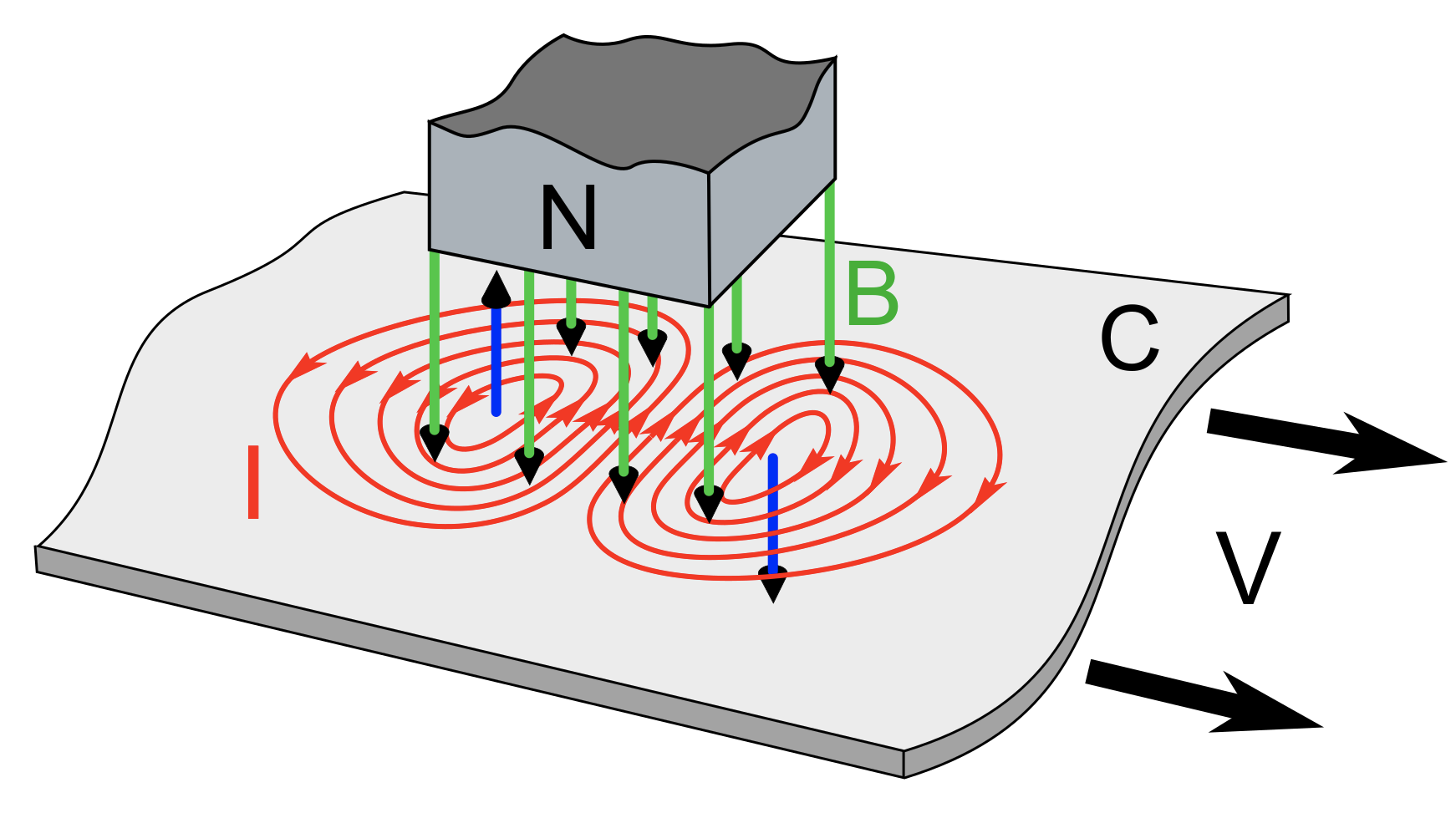
An airplane is a big magnet that flies

\(|\vec{B}_\text{sensor}| = |\vec{B}_{\oplus}+ \vec{B}_\text{anomaly}+ \vec{B}_\class{fa fa-plane}{}|\)
Aircraft Calibration
Sensor placement and installation
- Engineered location
- Stinger
- Survey for placement
- Non-magnetic fasteners
Degaussing
Algorithms
Magnetics
- Derivations
- Maxwell’s equations \(\rightarrow\) Quasi-magnetostatics
- Magnetic dipoles
- Magnetic fields in free space
- Terminology and definitions
- Textbooks and literature are not consistent
Quasi-magnetostatic limit applicability
\[ \frac{H_\mathrm{error}}{H} = \omega^2 {\mu_0 \epsilon_0} L^2 = \frac{\omega^2 L^2 }{c^2} = \frac{L^2}{\lambda^2} \]
#| echo: false
#| output: true
import numpy as np
from scipy.constants import speed_of_light as c
from matplotlib import pylab as plt
plt.ion()
freqs = np.array([0.1, 1, 10, 100])
wavelens = c/freqs
fg,ax = plt.subplots()
ax.loglog(freqs,wavelens,label='Wavelength')
ax.grid()
ax.set_xlabel('Frequency [Hertz]')
ax.set_ylabel('Wavelength [meter]')
ax.hlines(y=12.742e6,xmin=freqs[0], xmax=freqs[-1],color='red',label='Earth diameter')
ax.hlines(y=384.4e6,xmin=freqs[0], xmax=freqs[-1],color='green',label='Earth-moon distance')
_ = ax.legend()
World’s largest container ship, 400 m long.
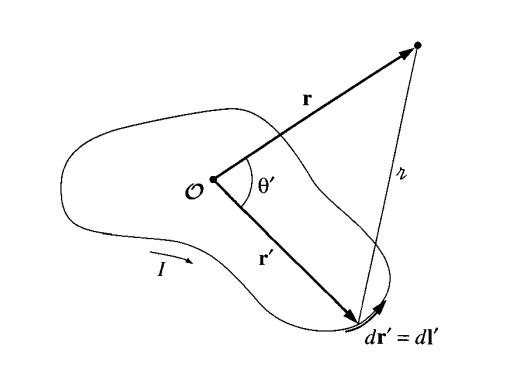
Multipole expansion
To find the equation of a dipole (Griffiths 1999) \[ \vec{A}(\vec{r}) = \frac{\mu_0}{4\pi} \int \frac{\vec{J}(\vec{r}')}{ \left| \vec{r} - \vec{r}' \right| } d^3 r' \] \[ \begin{align*} \frac{1}{\left| \vec{r} - \vec{r}' \right| } &= \frac{1}{\sqrt{r^2 + (r')^2 - 2 r r' cos\theta'}} \\ &= \frac{1}{r} \sum_{n=0}^{\infty} \left( \frac{r'}{r} \right)^n P_n(\cos\theta') \end{align*} \] \[ \vec{A}(\vec{r}) = \frac{\mu_0 I}{4\pi} \left[ \cancelto{0}{\frac{1}{r} \oint d\vec{\ell}' } + \frac{1}{r^2} \oint r' \cos\theta' d \vec{\ell}' + \frac{1}{r^3} \oint (r')^2 \left( \frac{3}{2} \cos^2 \theta' -\frac{1}{2} \right) d \vec{\ell}' \cdots \right] \]
Monopoles, dipoles and quadrapoles
\[ \vec{A}(\vec{r}) = \frac{\mu_0 I}{4\pi} \left[ \cancelto{0}{\frac{1}{r} \oint d\vec{\ell}' } + \frac{1}{r^2} \oint r' \cos\theta' d \vec{\ell}' + \frac{1}{r^3} \oint (r')^2 \left( \frac{3}{2} \cos^2 \theta' -\frac{1}{2} \right) d \vec{\ell}' \cdots \right] \]
Monopole
There are no magnetic monopoles \(\nabla\cdot\vec{B}=0\)
Dipole

Quadrapole
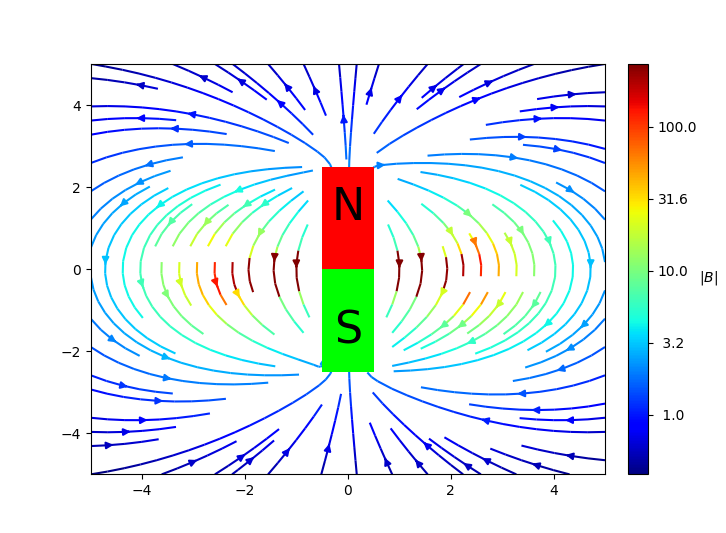
Dipole field lines
\[
\vec{B}_\mathrm{dipole} = \frac{\mu_0 }{4\pi} { \frac{1}{r^3} }\left[ 3 (\vec{m}\cdot \hat{r})\hat{r} - \vec{m} \right] \propto \frac{1}{r^3}
\tag{1}\]
Inverse cube dependence on distance from dipole \({ \frac{1}{r^3} }\)

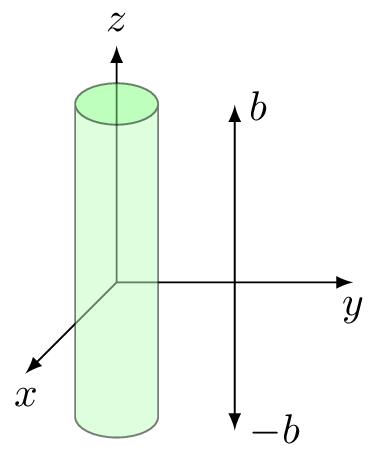
Physically large dipole - Bar magnet
Take a very simplified cylindrical geometry radius \(a\) and length \(2b\).
In this very stylized case, there’s a trick. We can solve the problem as if there were North and South magnetic “charges” \(Q_m\) at the two faces separated by the distance \(2b\)
\[ B_z = \frac{Q_m}{4\pi} \left\{ \frac{1}{(z-b)^2} - \frac{1}{(z+b)^2} \right\} \]
Can show \[ B_z \propto \frac{1}{(z/b)^3} \]
If \(z/b = 5\) then \(B_z(5b) \approx B_z(b)/125\)
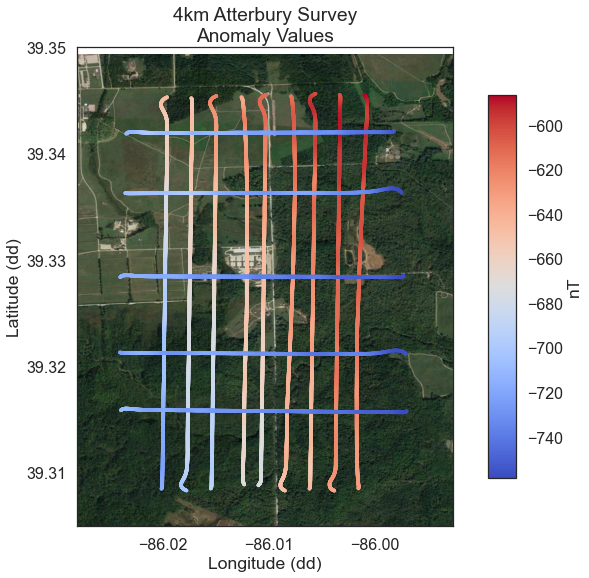
Aeromagnetic survey practices for MagNav
- Tolles-Lawson calibration flown before and/or after survey
- Surveys usually flown in grid pattern
- Flight lines used to model anomaly intensity
- Tie lines used for map leveling
- Local ground magnetometer reference station
- Records temporal changes of disturbance field
- (Bergeron and Nielsen 2023)
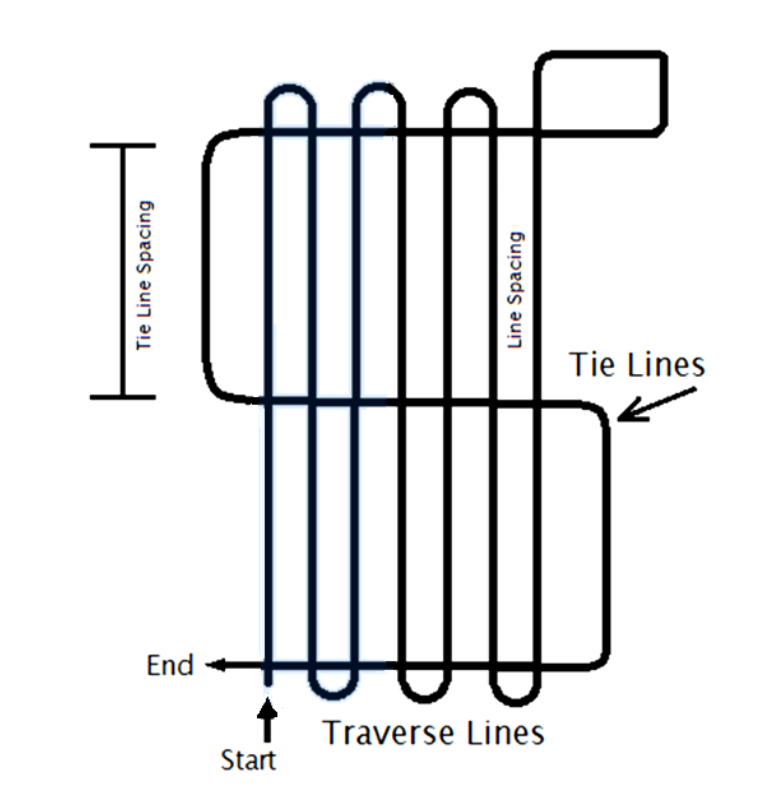
Example aeromagnetic survey flight path with dense, parallel flight lines and spare orthogonal tie lines.
Heading error and corrugation
- Heading error results in corrugation
- Mitigated via map leveling
- Usually by minimizing flight/tie line intersection differences
- (Reeves 2005), (Luyendyk 1997)
- Mitigated via map leveling
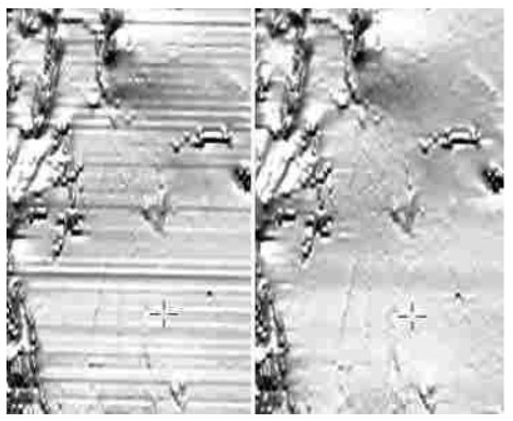
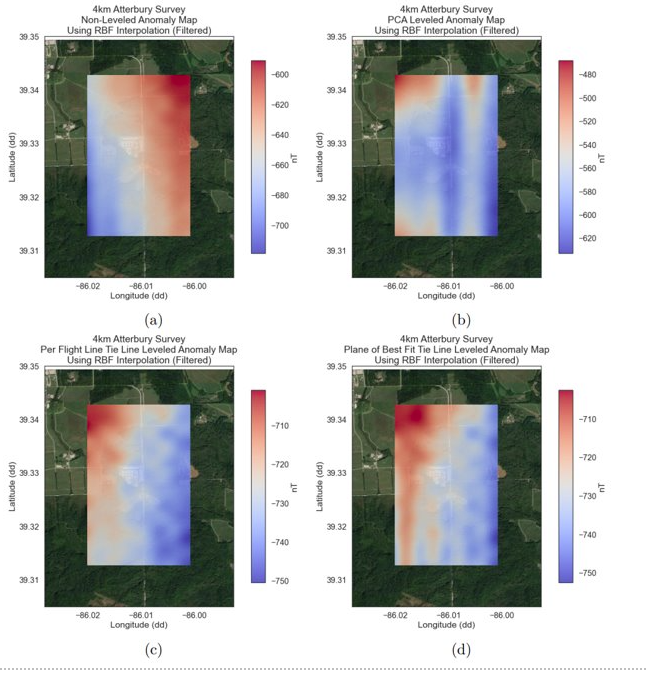
Differing leveling algorithms produce different results
Corrugation figure of merit
- Used to determine map leveling effectiveness
- Process:
- High-pass filter in the tie-line direction
- cut-off frequency give by the survey altitude AGL
- Average in flight line direction
- Fourier transform of average
- Largest magnitude within corrugation bandwidth (\(B_c\)) selected
- \(B_c\) is the corrugation bandwidth
- \(a_{agl}\) is the survey altitude
- Invert magnitude value to obtain FOM
- \[\frac{1}{a_{agl}(1+0.05)} \le B_c \le \frac{1}{a_{agl}(1+0.05)}\]
- High-pass filter in the tie-line direction
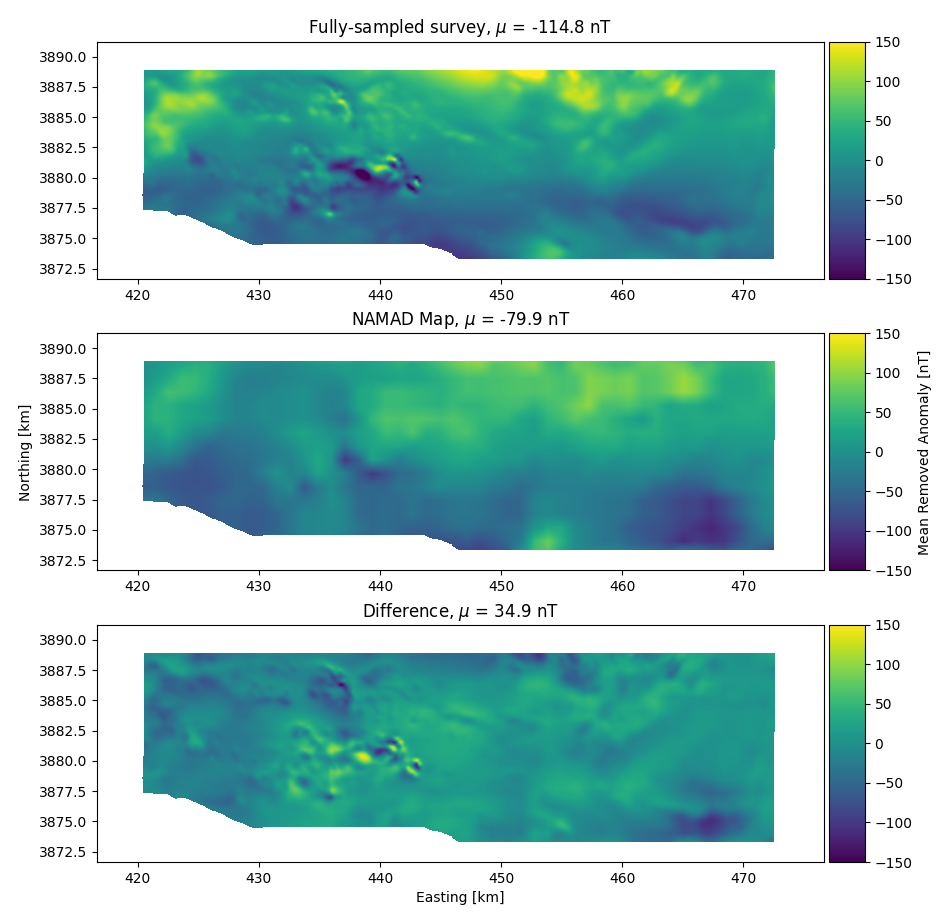
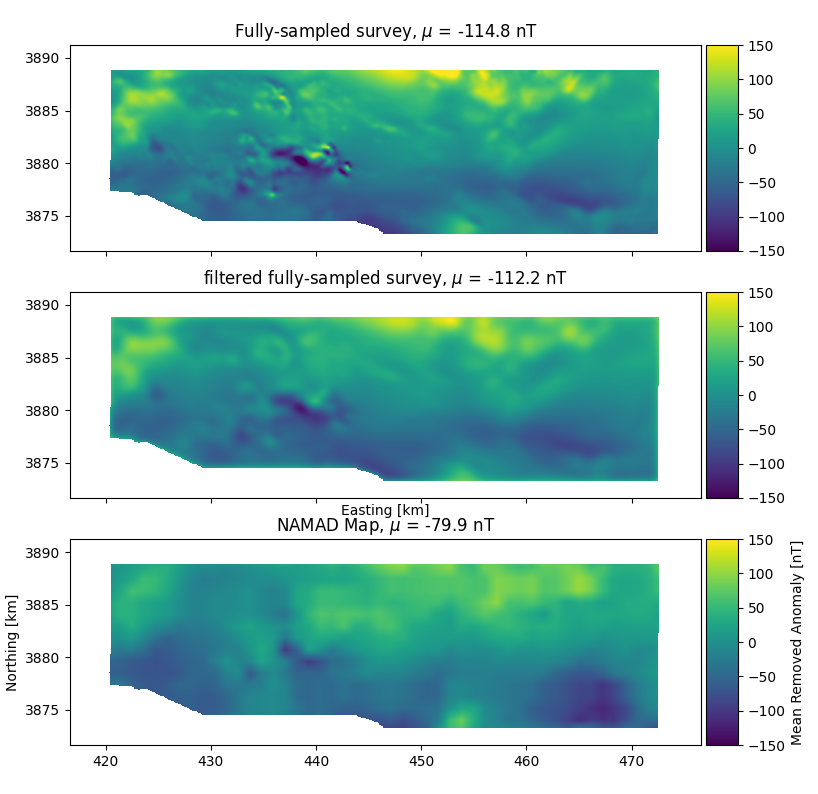
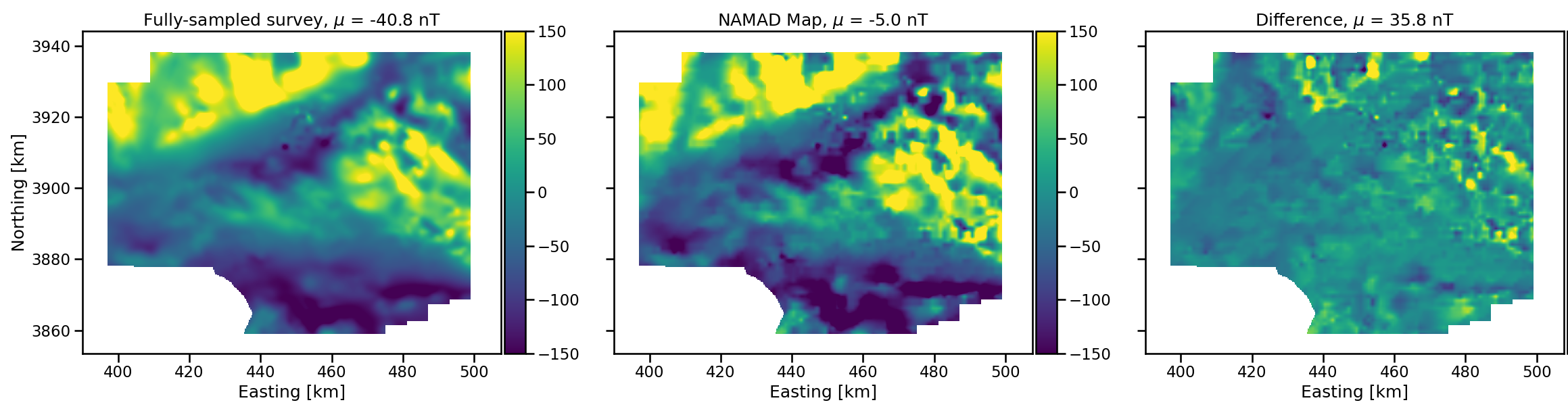
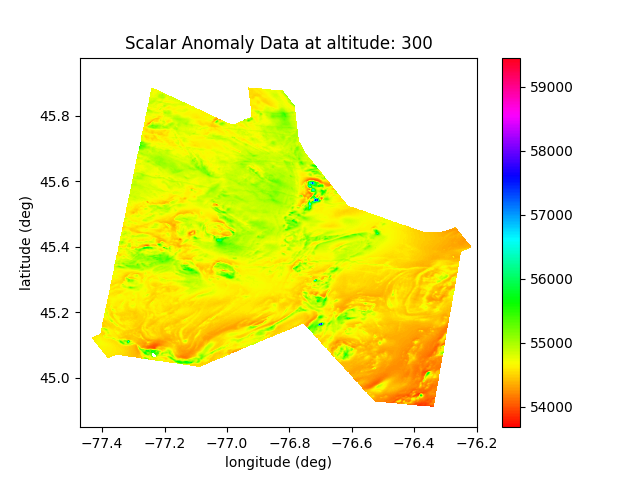
Map comparisons
- Magnetic maps of Mojave Desert
- Both at 300 m above ground level
- NAMAD (Bankey et al. 2002)
- resolution 1.1 km
- Fully sampled
- resolution 75 m
- Obvious missing features in NAMAD
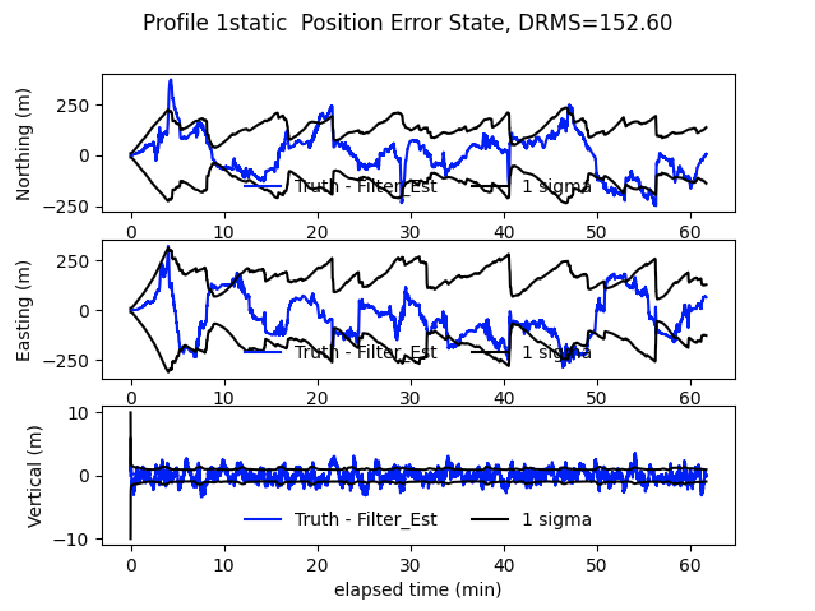
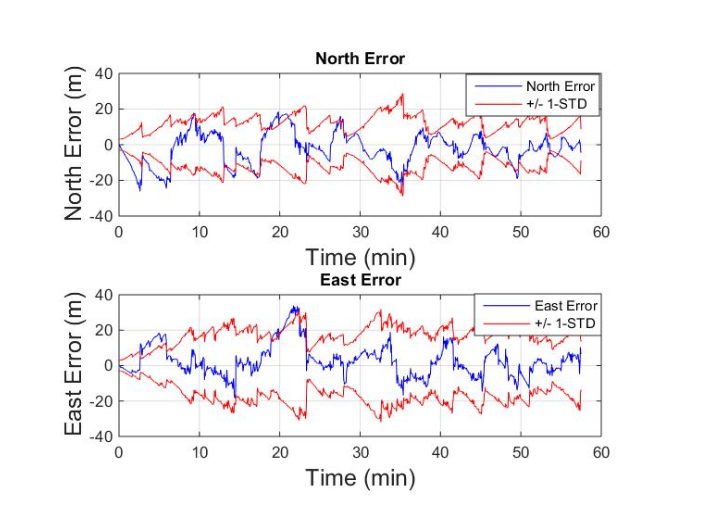
Navigation flight comparison - fully-sampled map
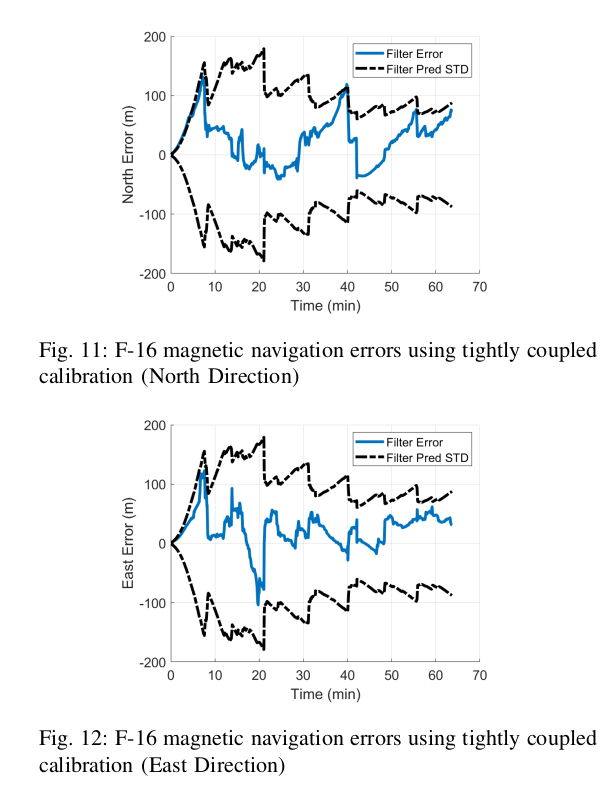
- Recent F-16 flight test demonstrated good navigation performance with a fully-sampled map
- Challenging calibration problem (\(\approx\) 5000 nT)
- Believe this to be the limiting factor to navigation performance
- Typical DRMS errors \(\approx\) 150 m
- (A. J. Canciani 2021), (Bonifaz 2022)
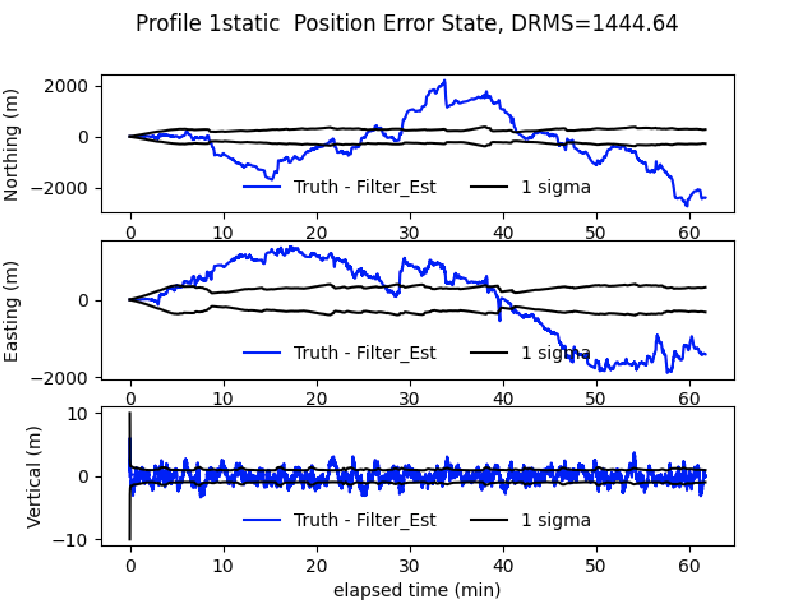
Navigation flight comparison - NAMAD map
- Substitute NAMAD map in navigator
- Typical DRMS errors \(\approx\) 1500 m
- Error grows \(\approx 10\times\)
- Only difference is the map used to navigate
- NAMAD typical of existing surveys
- What features drive larger error?
- How are these features quantified?
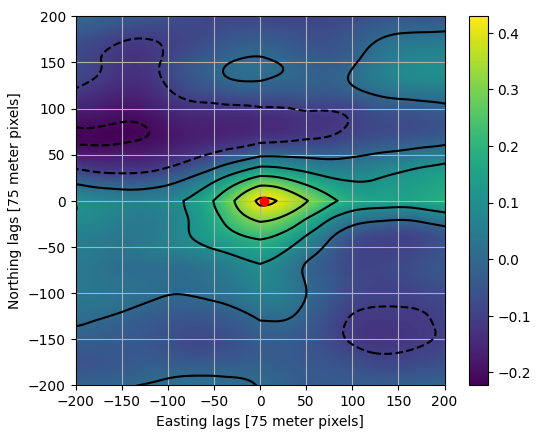
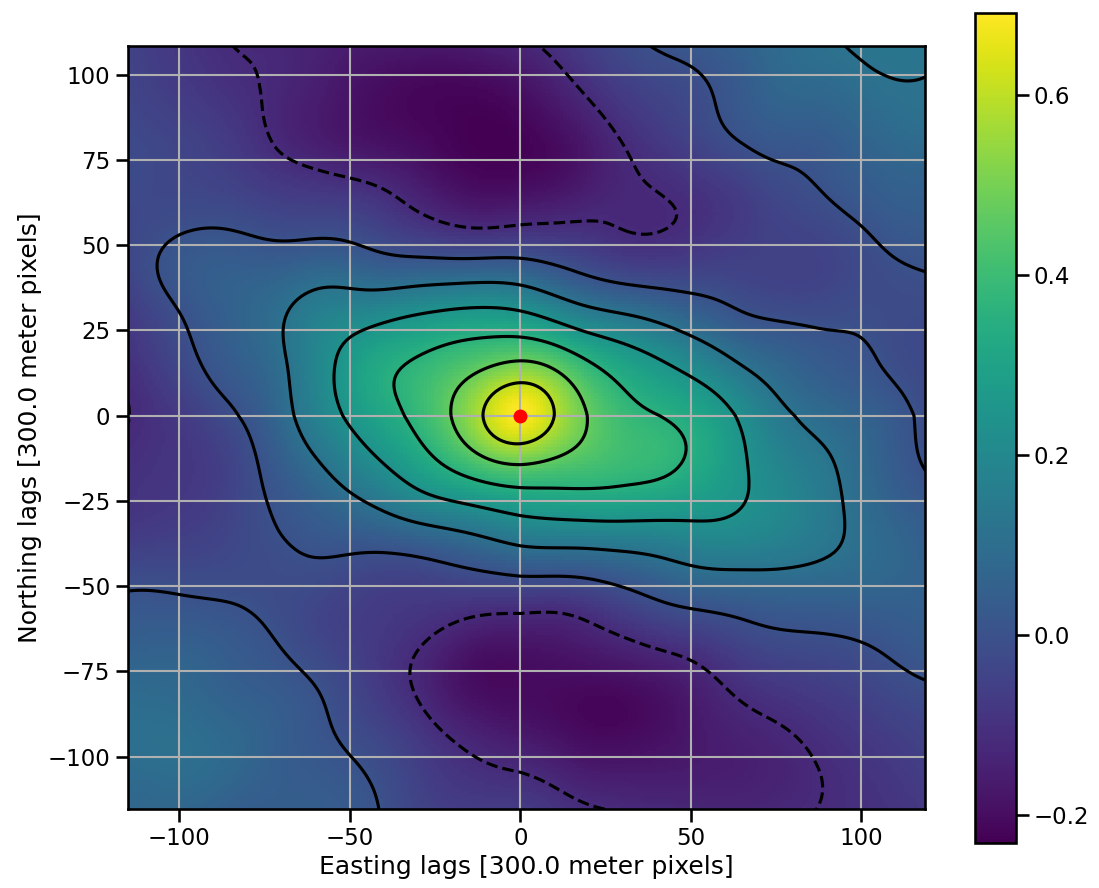
Map cross-correlation
- Filter fully-sampled map to NAMAD resolution
- 1.1 km
- Planar detrend both maps and perform cross-correlation
- Overall shift of 700 m between maps
Cross-correlation with fully-sampled NAMAD
- NAMAD spatial resolution becomes fully sampled at \(\approx\) 1100 m AGL
- Fully-sampled map survey flown at 2133 m AGL
- No overall shift between maps
- Registration errors masked at fully-sampled altitude
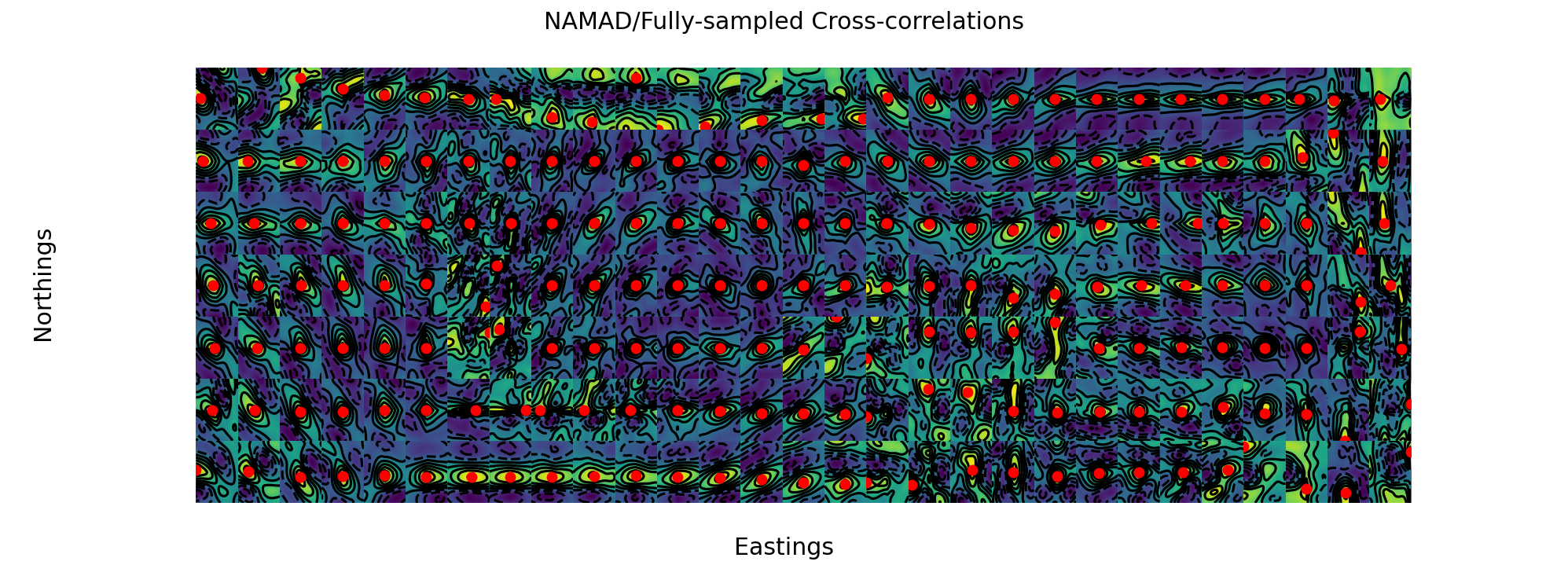
Tiled cross-correlation results
- Identify regions of different cross-correlation properties
- specifically a shift is peak location
- Traversing from one region to another adds a shift to the navigation solution
- Breaks long-distance correlations
Underlying NAMAD data
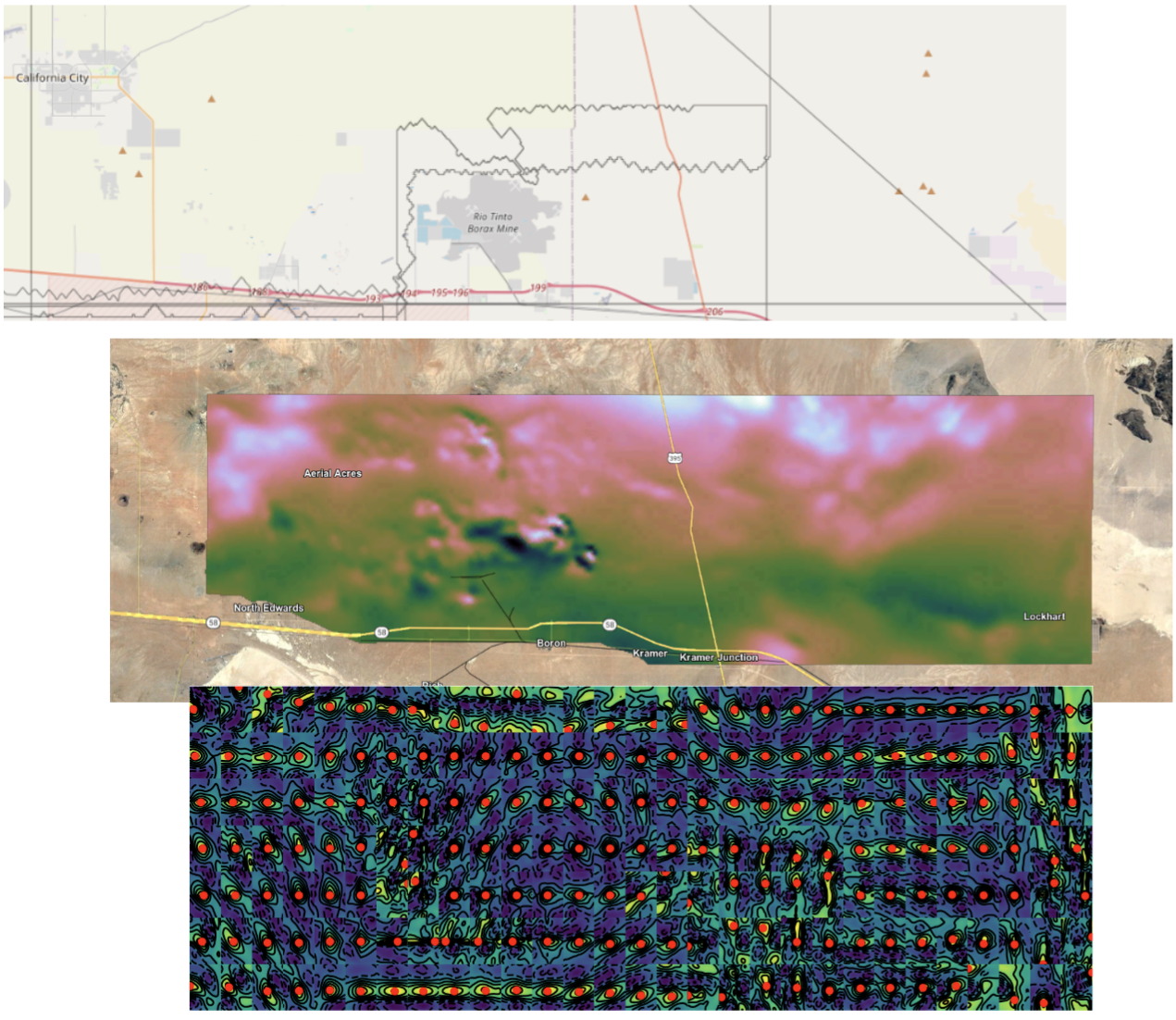
- Top Plot shows USGS survey boundaries (gray)
- Major feature in center Rio Tinto Borax Mine
- Open pit mining began 1957
- Many USGS survey in area 1954, 1955, 1978 (NURE)
- Oldest are hand-drawn digitized maps
- Survyes pre-date GPS
- Major cross-correlation peak shifts coincide with survey boundaries
Auto-correlation analysis

- NAMAD map auto-correlation differs in width and structure from fully-sampled map
- Fully-sampled map is asymmetic and longer
Auto-correlation line cuts
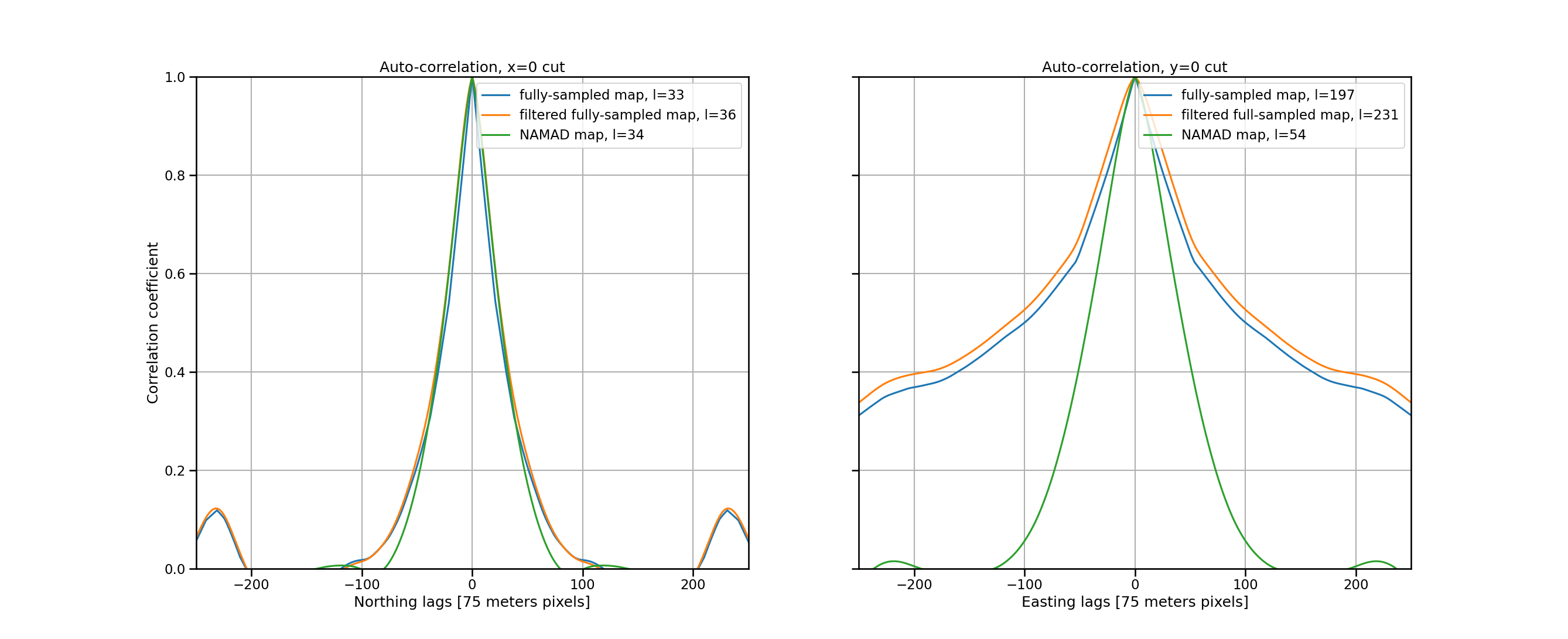
- Filtering to NAMAD spacing results in nearly same spatial correlation as unfiltered
- NAMAD map auto-correlation length
- Easting \(\approx 4 \times\) smaller than fully-sampled map
- Northing approx the same
- Geo-registration shifts in NAMAD cause loss of correlation
Power-spectral analysis
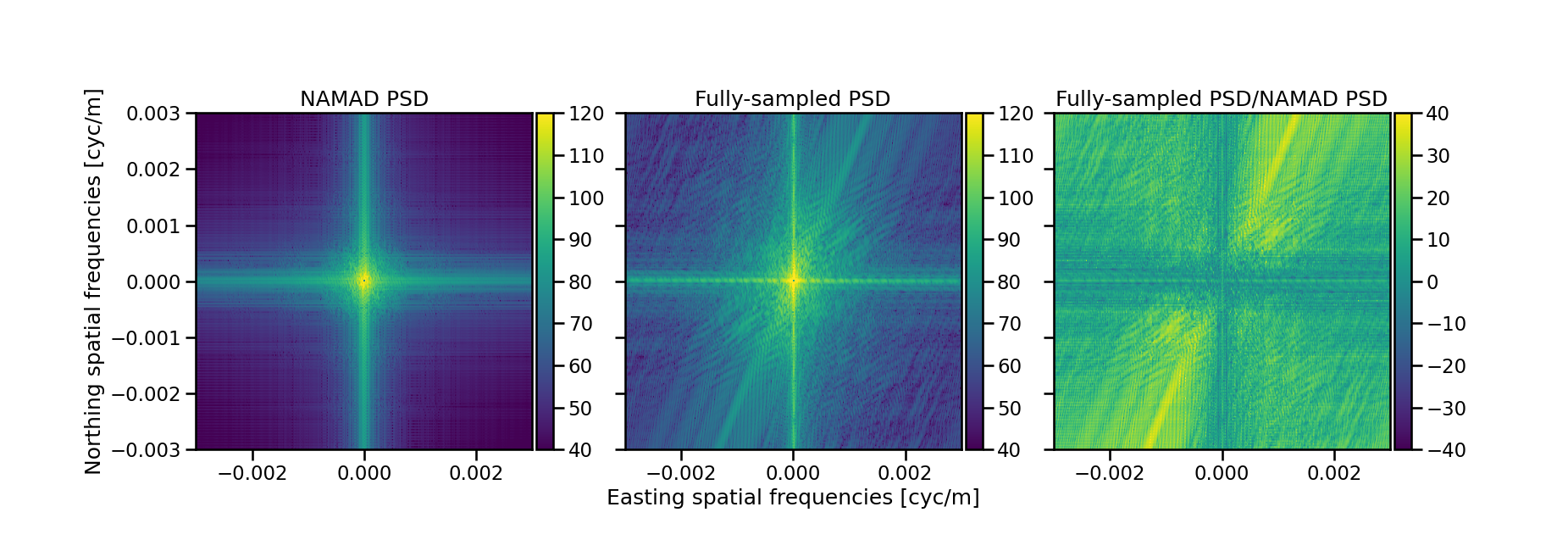
- NAMAD map confined to very narrow frequency reponse
- As much as 40 dB of energy missing at higher frequecies in NAMAD
Magnetometer history
- Compass use documented in China 4th Century BCE (Yan 475-221 BCE)
- Gauss invented magnetometer in 1833 (Gauss 1833)
- Aschenbrenner and Goubau invented flux-gate magnetometer in 1936 (Aschenbrenner 1936)
- Vector sensor, measures one component of \(\vec{B}\)
- 3 sensors required to measure all components
- Vacquier invented airborne version of fluxgate (Vacquier 1945)
- Used gimbal to align sensor axis with total field
- Alkali vapor magnetometers (Bloom 1962) (Bell and Bloom 1957)
- Measure vector magnitude or total field \(|\vec{B}|\)
- Review article in (Tierney et al. 2019)
Vaquier towed magnetometer, National Museum of American History (Smithsonian Institution, n.d.)
History notes:
https://www.sciencenews.org/article/fluxgate-magnetometer-submarine-plate-tectonics
https://science.nasa.gov/technology/technology-highlights/rediscovering-the-lost-art-of-fluxgate-magnetometer-cores
https://geomag.nrcan.gc.ca/lab/vm/fluxgate-en.php
https://geomag.nrcan.gc.ca/lab/vm/museum-en.php
https://www.sciencenews.org/article/fluxgate-magnetometer-submarine-plate-tectonics
https://americanhistory.si.edu/collections/search/object/nmah_871581
https://faculty.epss.ucla.edu/~ctrussell/ESS265/History.html
https://wiki.seg.org/wiki/Victor_Vacquier
Scalar measurements
- Used traditionally to avoid need to measure true attitude in Earth frame
- INS not available as practical technology until 1960’s or later Smithsonian history of inertial navigation, Smithsonian Institution (n.d.)

Sensors for scalar measurements
Scalar sensors used to avoid rotation issues


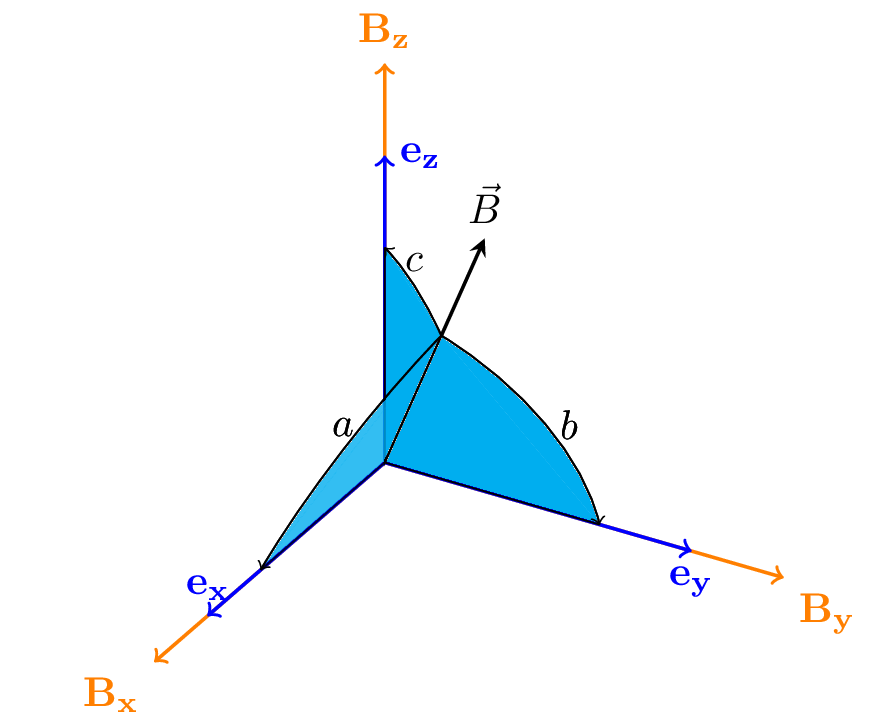
Vector sensors as attitude sensors
- Could not measure your true orientation in Earth reference frame (no IMU)
- Could measure orientation around Earth field using vector sensor
- Vector could be strap-down
- Direction cosines used
- Tolles-Lawson calibration (W. E. Tolles and Lawson 1950) (W. E. Tolles 1954) (W. E. Tolles 1955) (Leliak 1961)
\[ \begin{align*} DC_x = \arccos{a} &= \frac{B_x}{\sqrt{B_x^2 + B_y^2 + B_z^2}}\\ DC_y = \arccos{b} &= \frac{B_y}{\sqrt{B_x^2 + B_y^2 + B_z^2}}\\ DC_z = \arccos{c} &= \frac{B_z}{\sqrt{B_x^2 + B_y^2 + B_z^2}} \end{align*} \]
Vector calibration example
- Before calibration, the vector magnetometer lies on a shifted ellipse.
- After calibration, the vector magnetomter values will lie on the surface of a sphere.
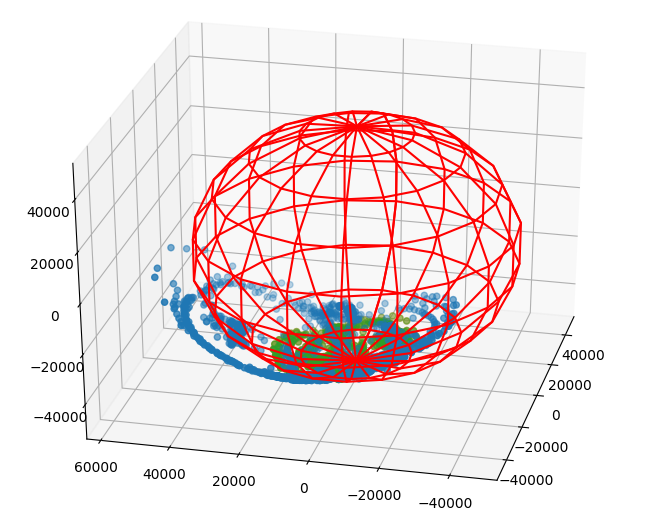
- blue - before calibration
- green -after calibration
- red - fixed magnitude sphere
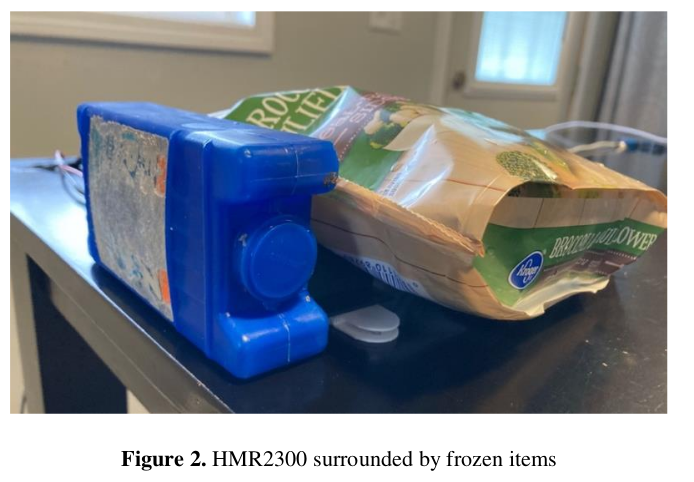
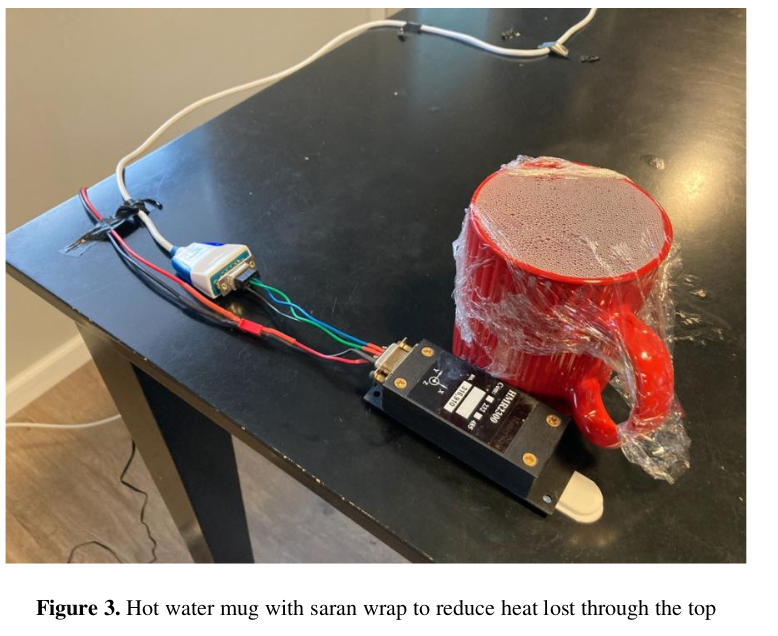
Temperature dependence
Newton’s law of cooling \[T(t) = T_s +(T_0 - T_s)\exp(-kt)\] which is the solution to \[\frac{dT}{dt} = -k(T_0 - T_s)\] if \(H \propto T\) then we can write by analogy \[H(t) = H_f + (H_0 - H_f)\exp(-kt)\]
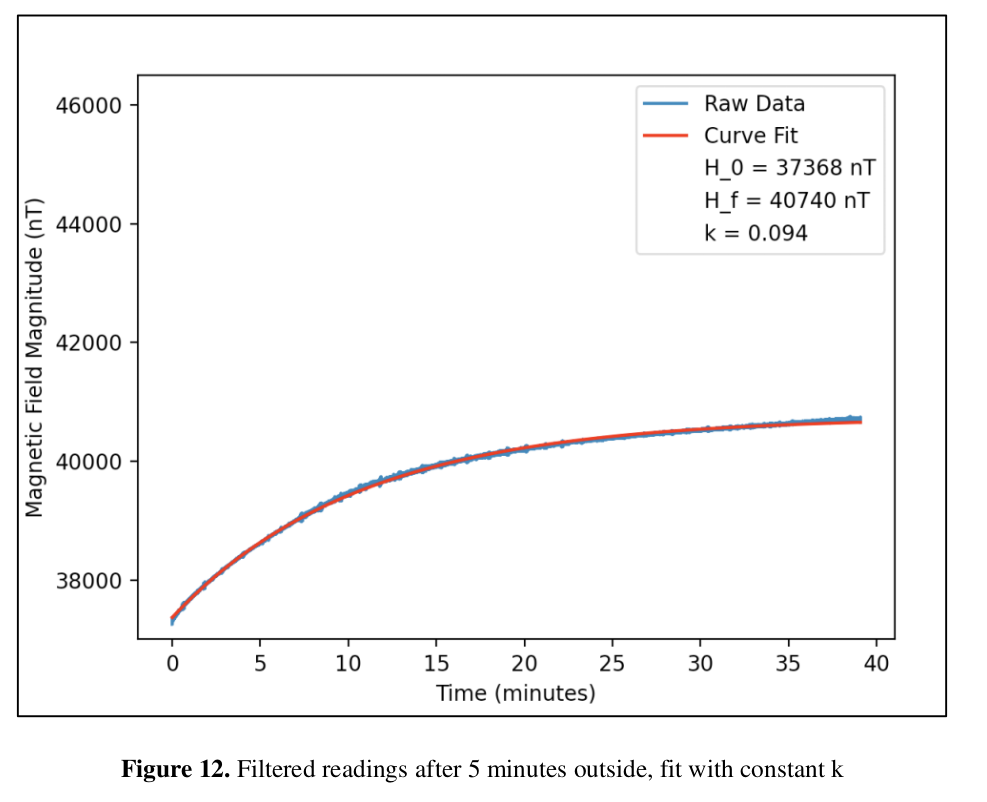
Temperature compensation
Newton’s law of cooling \[T(t) = T_s +(T_0 - T_s)\exp(-kt)\] which is the solution to \[\frac{dT}{dt} = -k(T_0 - T_s)\] if \(H \propto T\) then we can write by analogy \[H(t) = H_f + (H_0 - H_f)\exp(-kt)\]
Scalar sensors
Scalar sensor has advantage that it’s output independent of magnetic field orientation.
Generally we refer to Atomic vapor sensors.
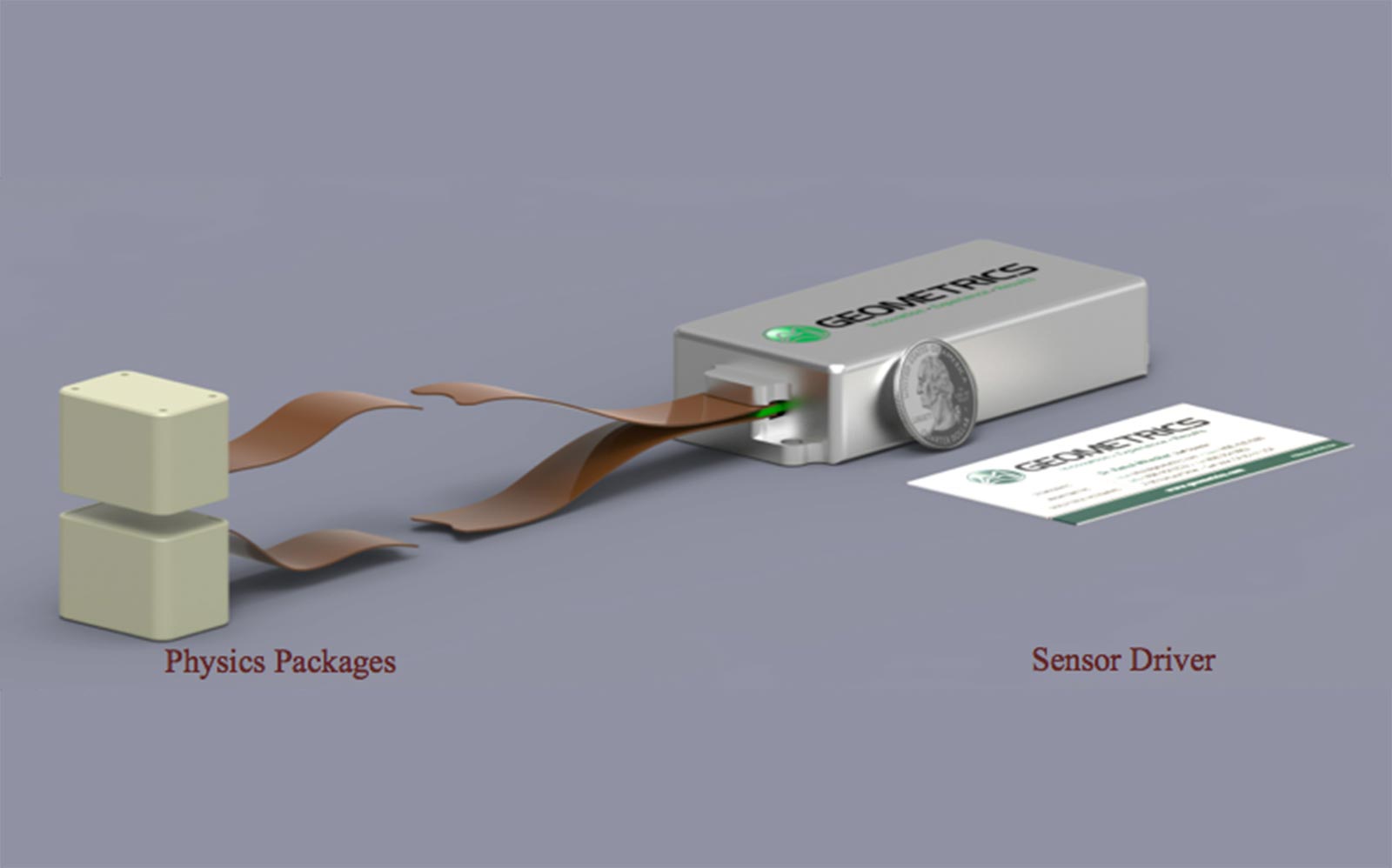
Geometrics MFAM (MFAM Module Specifications, Laser Pumped Cesium Magnetometer 2020)
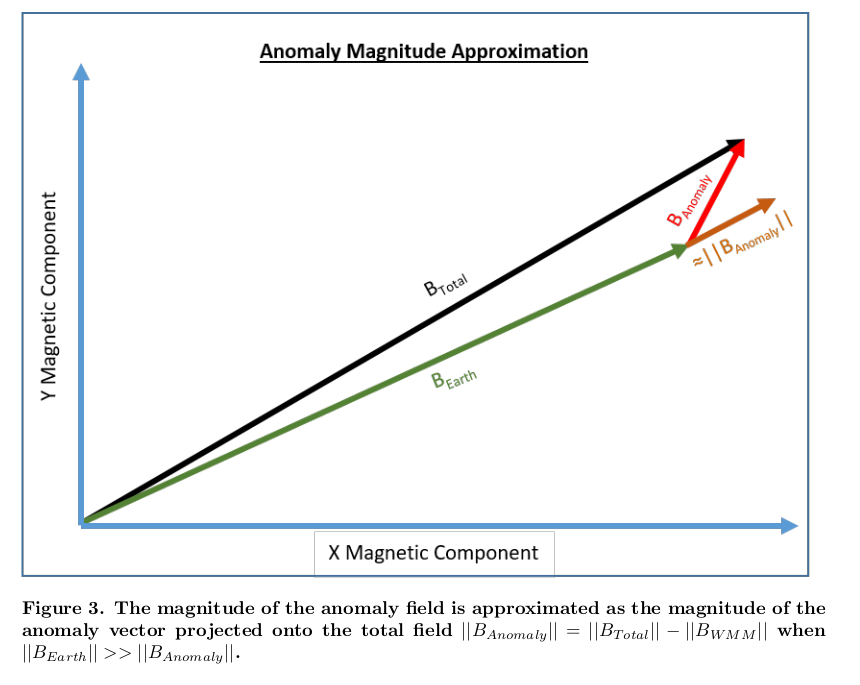
Interpretation of scalar value in geomagnetic context
\[ \begin{align*} |\vec{B}_\mathrm{total}| &= |\vec{B}_\mathrm{Earth} + \vec{B}_\mathrm{anomaly}|\\ &= \sqrt{ |B_\mathrm{Earth}|^2 + |B_\mathrm{anomaly}|^2 + 2 |B_\mathrm{Earth}||B_\mathrm{anomaly}|\cos\theta}\\ |B_\mathrm{total}| &= |B_\mathrm{Earth}| \sqrt{ 1 + \frac{|B_\mathrm{anomaly}|^2}{|B_\mathrm{Earth}|^2} + 2\frac{|B_\mathrm{anomaly}|}{|B_\mathrm{Earth}|}\cos\theta } \\ &\approx |B_\mathrm{Earth}| + |B_\mathrm{anomaly}|\cos\theta + \cdots \end{align*} \]
\(|B_\mathrm{anomaly}|\) is the projection of \(\vec{B}_\mathrm{anomaly}\) onto \(\vec{B}_\mathrm{Earth}\)
Atomic sensors - Larmor precession
Atomic vapor sensors operate on the principle of Larmor precession
These are gases that have an unpaired electron that has a specific magnetic moment.
Cesium \(\gamma = 3.5\ \text{nT/Hz}\)
In Earth field of \(50000\ \text{nT} \rightarrow 175 \text{kHz}\)
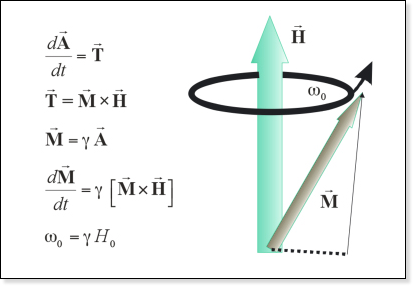
- \(\vec{A}\) is angular momentum
- \(\vec{T}\) is torque
- \(\vec{M}\) is magnetic moment
- \(\vec{H}\) is magnetic field
- \(\gamma\) is gyromagnetic ratio
Atomic sensor operation
Inside the sensor head is the Ce gas. Without doing anything the atoms in the gas have a random orientation.
A pump laser with a specific polarization orients the Ce spins and excites them to a specific state.
A probe laser reads out the precesion rate and the magnetic field is inferred.
The probe laser is polarized so that it is absorbed by the Ce gas when the spin aligns with the beam polarization.
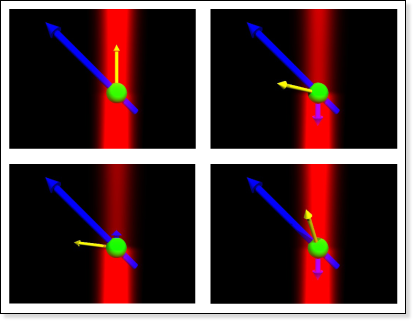
- Geometrics
- Red - probe laser beam
- Blue - magnetic field
- Yellow - magnetic moment
Deadzone
Related to the pump laser optical axis.
Pump laser is circular polarized and transfers angular momentum to the atoms so that they spin align to the optical axis \((\vec{M}\parallel\text{optical\ axis})\)
Torque \(\vec{T}\) on \(\vec{M}\) from \(\vec{H}\) is: \[ \vec{T} = \vec{M} \times \vec{H} \] If \(\vec{M} \parallel \vec{H}\), then \(\vec{T} = \vec{M} \times \vec{H} = 0\)
No torque \(\rightarrow\) no precession and no signal to monitor.
Details of laser-gas interaction define deadzone size.
Deadzone avoidance
- Orient optical axis based on knowledge of external field
- OK if external field does not move - not practical for vehicles
- Use multiple sensors
- arrange so that one is always out of deadzone, how many do you need?
- travel from Northern to Southern hemisphere
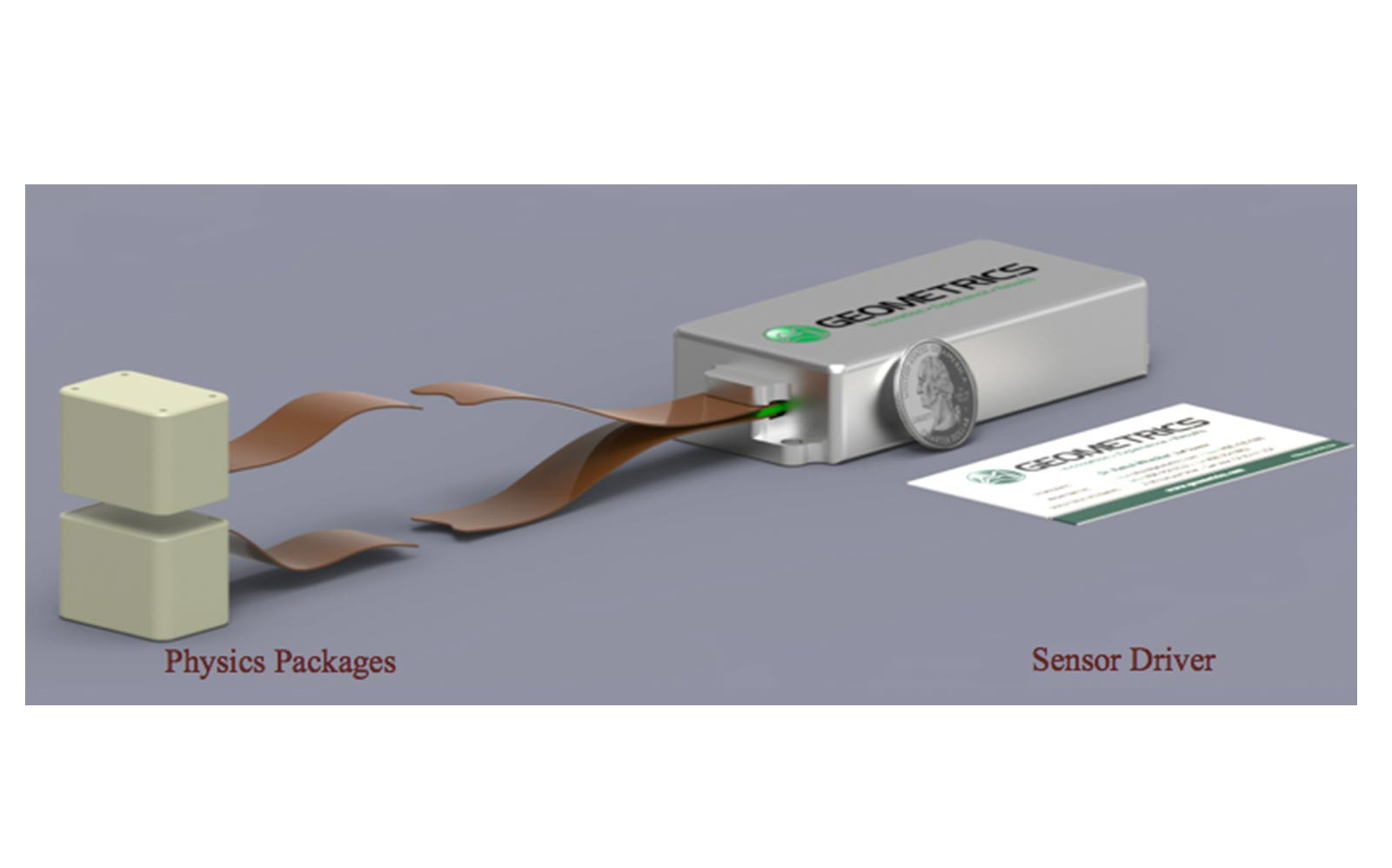
Geometrics MFAM (MFAM Module Specifications, Laser Pumped Cesium Magnetometer 2020)
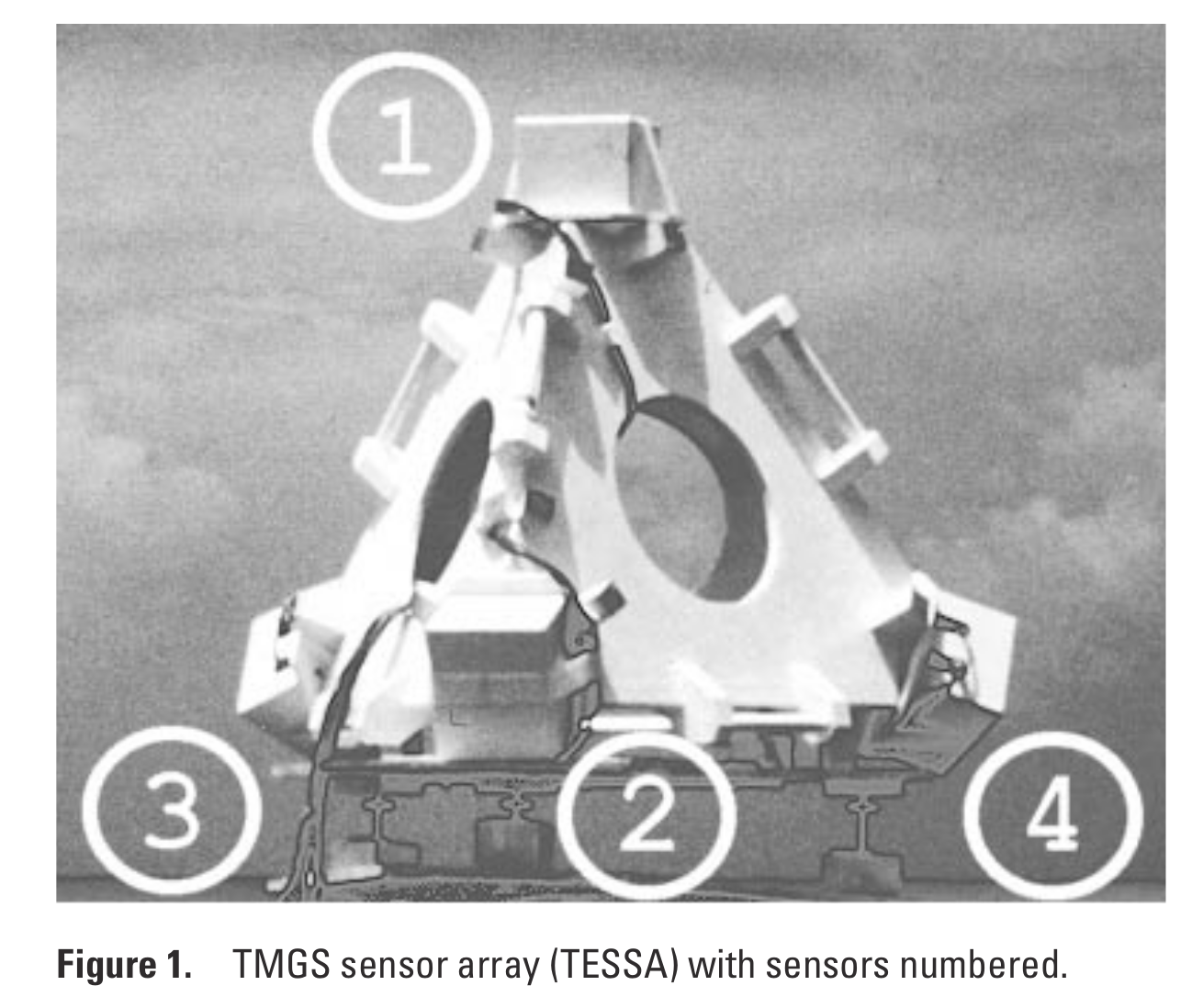
Vector Gradiometer aka Tensiometer
Because of the contraints, a vector gradiometer can be made with \(\ge 4\) vector sensors in a cross (plane) or in a tetrahedron or similar shape.
 From
From 
An airplane is a big magnet that flies
\(|\vec{B}_\text{sensor}| = |\vec{B}_{\oplus}+ \vec{B}_\text{anomaly}+ \vec{B}_\text{disturbance}+ \vec{B}_\class{fa fa-plane}{}|\)
An airplane is a big magnet that flies
\(|\vec{B}_\text{sensor}| = |\vec{B}_{\oplus}+ \vec{B}_\text{anomaly}+ \vec{B}_\text{disturbance}+ \vec{B}_\class{fa fa-plane}{}|\)
\(|\vec{B}_\text{ext}| = |\vec{B}_{\oplus}+ \vec{B}_\text{anomaly} + \vec{B}_\text{disturbance}|\)
\(|\vec{B}_\text{sensor}| = |\vec{B}_\text{ext}+ \vec{B}_\class{fa fa-plane}{}|\)
assume \(|\vec{B}_\class{fa fa-plane}{}|/|\vec{B}_\text{ext}|\ll 1\)
\(|\vec{B}| \approx |\vec{B}_\text{ext}| + \frac{1}{2}\vec{B}_\class{fa fa-plane}{}\cdot\vec{B}_\text{ext}\)
need a model for \(\vec{B}_\class{fa fa-plane}{}\)

Tolles-Lawson
- Calibration technique developed in WW2 for submarine hunting
- Declassified in 1950’s and patented
- Standard calibration technique used for aero-magnetic surveys
- Developed by (Leliak 1961)

\[ \begin{align*} |B_\text{sensor}| &= |\vec{B}_\text{ext}+ \vec{B}_\class{fa fa-plane}{}|\\ &= \sqrt{ |B_\text{ext}|^2 + |B_\class{fa fa-plane}{}|^2 + 2 |B_\text{ext}||B_\class{fa fa-plane}{}|\cos\theta}\\ |B_\text{sensor}| &= |B_\text{ext}| \sqrt{ 1 + \frac{|B_\class{fa fa-plane}{}|^2}{|B_\text{ext}|^2} + 2\frac{|B_\class{fa fa-plane}{}|}{|B_\text{ext}|}\cos\theta} \end{align*} \]
Tolles-Lawson
- Calibration technique developed in WW2 for submarine hunting
- Declassified in 1950’s and patented
- Standard calibration technique used for aero-magnetic surveys
- Developed by (Leliak 1961)
\[ \begin{align*} |B_\text{sensor}| &= |\vec{B}_\text{ext}+ \vec{B}_\class{fa fa-plane}{}|\\ &= \sqrt{ |B_\text{ext}|^2 + |B_\class{fa fa-plane}{}|^2 + 2 |B_\text{ext}||B_\class{fa fa-plane}{}|\cos\theta}\\ |B_\text{sensor}| &= |B_\text{ext}| \sqrt{1 + 2\frac{|B_\class{fa fa-plane}{}|}{|B_\text{ext}|}\cos\theta} \end{align*} \]
Tolles-Lawson Path to Calibration 1/2
\[
\begin{align*}
|B_\text{Sensor}| &= |\vec{B}_\text{ext}+ \vec{B}_\class{fa fa-plane}{}|\\
&= \sqrt{ |B_\text{ext}|^2 + |B_\class{fa fa-plane}{}|^2 + 2 |B_\text{ext}||B_\class{fa fa-plane}{}|\cos\theta}\\
|B_\text{Sensor}| &= |B_\text{ext}| \sqrt{ 1 + 2\frac{|B_\class{fa fa-plane}{}|}{|B_\text{ext}|}\cos\theta}\\
&\approx |B_\text{ext}| + |B_\class{fa fa-plane}{}|\cos\theta + \cdots
\end{align*}
\]
Path to Calibration
Measure \(\cos\theta\)
Solve \(|B_\text{sensor}| = |B_\text{ext}| + |B_\class{fa fa-plane}{}|\cos\theta\)
Assuming \(|B_\text{ext}|\) is known or constant
Tolles-Lawson Path to Calibration 2/2
Path to Calibration
Measure \(\cos\theta\)
Solve \(|B_\text{sensor}| = |B_\text{ext}| + |B_\class{fa fa-plane}{}|\cos\theta\)
Assuming \(|B_\text{ext}|\) is known or constant
How to measure \(\cos\theta\)?
Use a vector magnetometer
Rotate aircraft in \(\vec{B}_\text{ext}\)
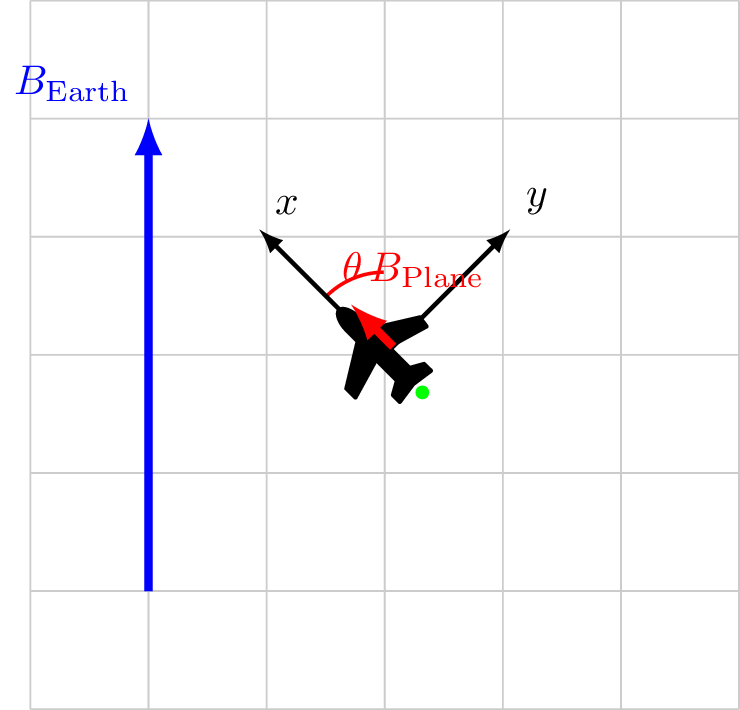
Calibration 1/4
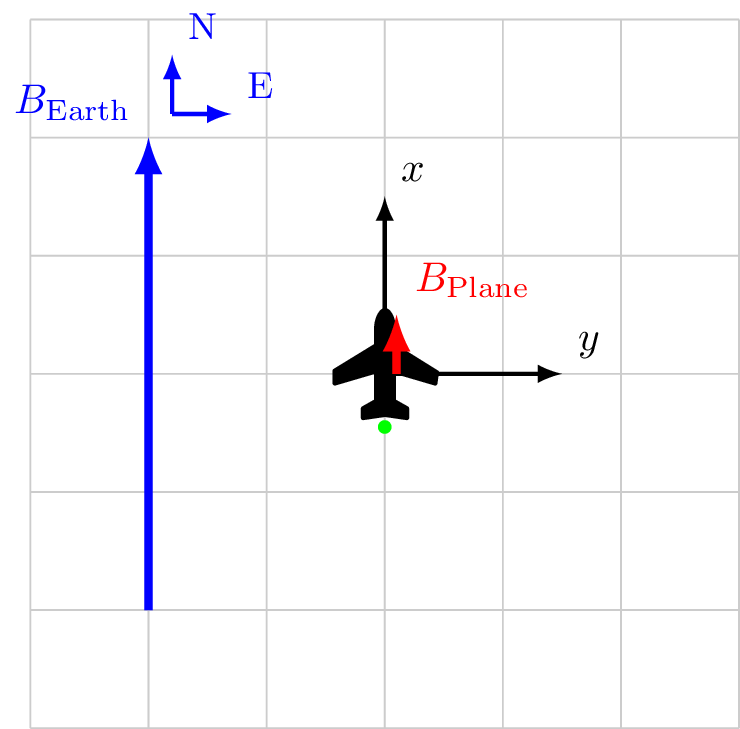
Coordinate system fixed to aircraft
\[\vec{B}_\text{Sensor} = \vec{B}_\text{ext}+ \vec{B}_\class{fa fa-plane}{}\]
\[
\begin{alignat*}{3}
\vec{B}_\text{ext}&= 4.0 \hat{x} && + 0.0 \hat{y} \\
\vec{B}_\class{fa fa-plane}{}&= 0.5 \hat{x} && +0.0 \hat{y} \\
\vec{B}_\text{Sensor} &= 4.5 \hat{x} && + 0.0 \hat{y} \\
|B_\text{Sensor}| &= 4.5 && \\
\cos X &= \frac{4.5}{4.5} && = 1\\
\cos Y &= \frac{0.0}{4.5} && = 0\\
\end{alignat*}
\]
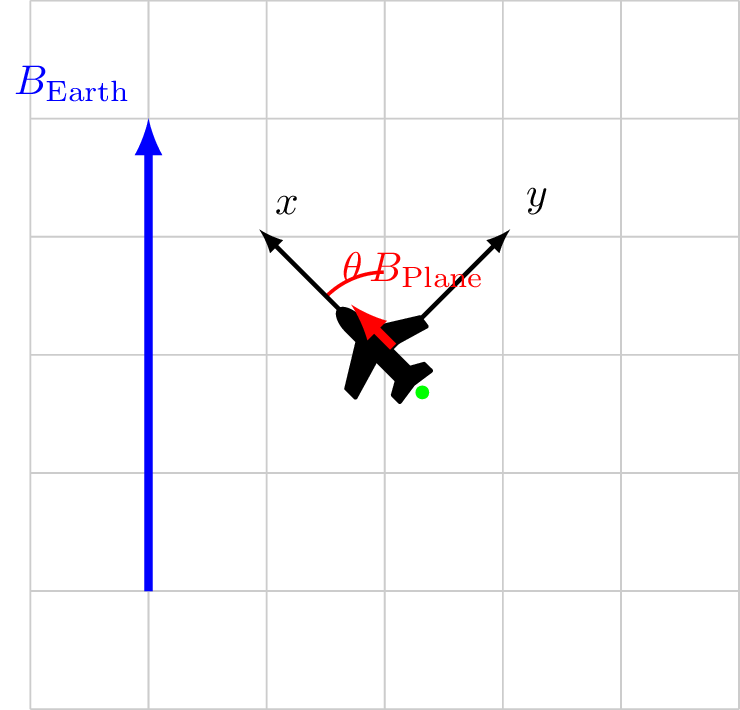
Calibration 2/4
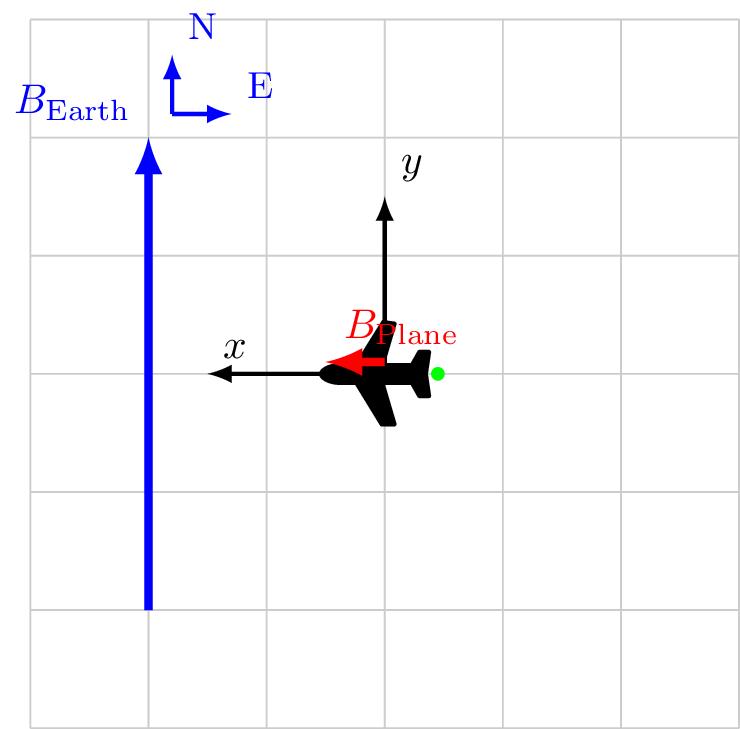
Coordinate system fixed to aircraft
\[\vec{B}_\text{Sensor} = \vec{B}_\text{ext}+ \vec{B}_\class{fa fa-plane}{}\]
\[
\begin{alignat*}{3}
\vec{B}_\text{ext}&= 0.0 \hat{x} && + 4.0 \hat{y} \\
\vec{B}_\class{fa fa-plane}{}&= 0.5 \hat{x} && + 0.0 \hat{y} \\
\vec{B}_\text{Sensor} &= 0.5 \hat{x} && + 4.0 \hat{y} \\
|B_\text{Sensor}| &= 4.007 && \\
\cos X &= \frac{0.5}{4.007} && \ne 0 \rightarrow 82.8^\circ\\
\cos Y &= \frac{4.0}{4.007} && \approx 1\\
\end{alignat*}
\]
Calibration 3/4
Coordinate system fixed to aircraft
\[\vec{B}_\text{Sensor} = \vec{B}_\text{ext}+ \vec{B}_\class{fa fa-plane}{}\]
\[
\begin{alignat*}{3}
\vec{B}_\text{ext}&= -4.0 \hat{x} && + 0.0 \hat{y} \\
\vec{B}_\class{fa fa-plane}{}&= 0.5 \hat{x} && + 0.0 \hat{y} \\
\vec{B}_\text{Sensor} &= -3.5 \hat{x} && + 0.0 \hat{y} \\
|B_\text{Sensor}| &= 3.5 && \\
\cos X &= \frac{-3.5}{3.5} && = -1\\
\cos Y &= \frac{0}{3.5} && = 0\\
\end{alignat*}
\]
Calibration 4/4
Coordinate system fixed to aircraft
\[\vec{B}_\text{Sensor} = \vec{B}_\text{ext}+ \vec{B}_\class{fa fa-plane}{}\]
\[
\begin{alignat*}{3}
\vec{B}_\text{ext}&= 0.0 \hat{x} && + -4.0 \hat{y} \\
\vec{B}_\class{fa fa-plane}{}&= 0.5 \hat{x} && + 0.0 \hat{y} \\
\vec{B}_\text{Sensor} &= 0.5 \hat{x} && + -4.0 \hat{y} \\
|B_\text{Sensor}| &= 4.007 &&\\
\cos X &= \frac{0.5}{4.007} && \ne 0\\
\cos Y &= \frac{-4.0}{4.007} && \approx -1\\
\end{alignat*}
\]
Standard calibration model - Tolles-Lawson
\[|\vec{B}_\text{sensor}| = |\vec{B}_\text{ext}+ \vec{B}_\class{fa fa-plane}{}|\]
\[ \begin{array}{ l B c B c B c } \vec{B}_\class{fa fa-plane}{}& = & \vec{B}_\text{Permanent} & + & \vec{B}_\text{Induced} & + & \vec{B}_\text{Eddy}\\ & = & \vec{P}_\text{constant} {} & + &{} M_{3\times3} \vec{B}_\text{ext}{} & + & {} S_{3\times3} \frac{\partial}{\partial t} \vec{B}_\text{ext} \end{array} \]
\(M_{3\times3}\) is symmetric \(\rightarrow\) 6 independent elements
Total of 18 elements
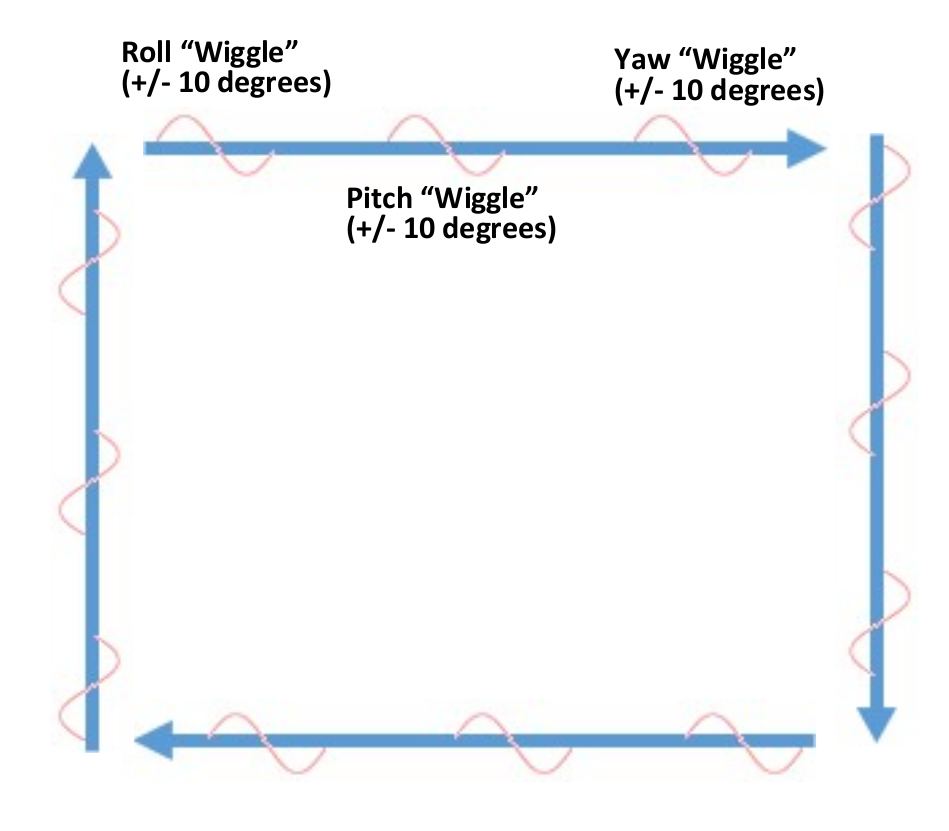
Calibration manuevers - Tolles-Lawson
Fly the aircraft in a series of Roll, Pitch, Yaw maneuvers
High-altitude
Altitude of a known map
Maneuver angle should depend upon the expected aircraft dynamics
- Barrel Rolls?
Typically at each cardinal heading
- 3 rolls \(\pm 10^\circ\) at 1 Hz
- 3 pitches \(\pm 10^\circ\) at 1 Hz
- 3 yaws \(\pm 10^\circ\) at 1 Hz
(W. E. Tolles and Lawson 1950), (W. E. Tolles 1954), (W. E. Tolles 1955), (Gnadt, Wollaber, and Nielsen 2022)
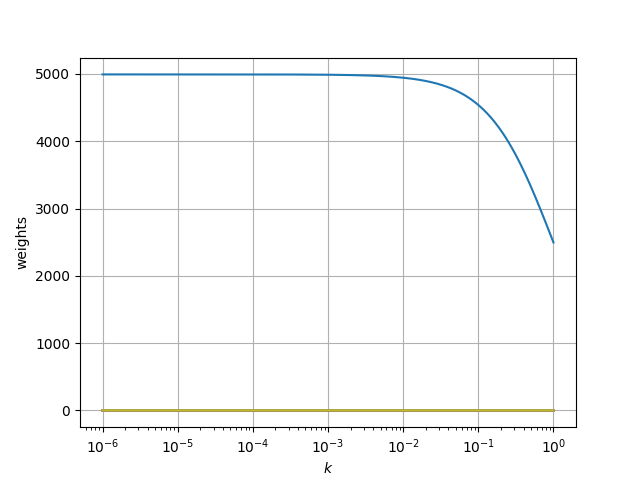
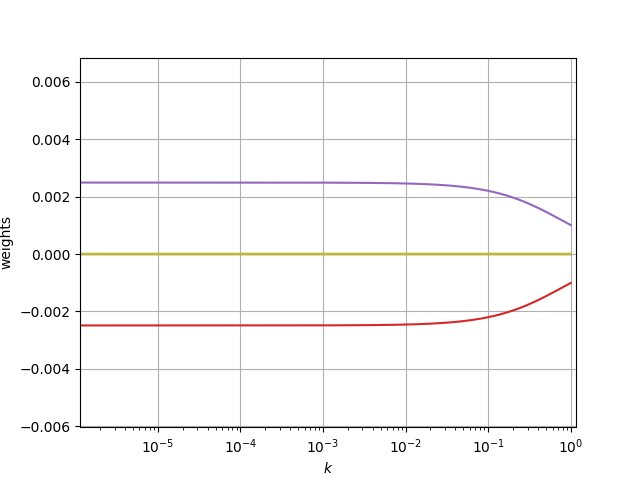
Finding ridge regression hyper-parameter \(k\)
- \(k \rightarrow \infty\) leads to \(c=0\)
- \(k = 0\) leads to regular least squares
- Examine “Ridge Trace” Plot
- Identify where the \(c\) stabilize
Finding ridge regression hyper-parameter \(k\)
- \(k \rightarrow \infty\) leads to \(c=0\)
- \(k = 0\) leads to regular least squares
- Examine “Ridge Trace” Plot
- Identify where the \(c\) stabilize
- In this case \(k\approx 1\times10^{-4}\)
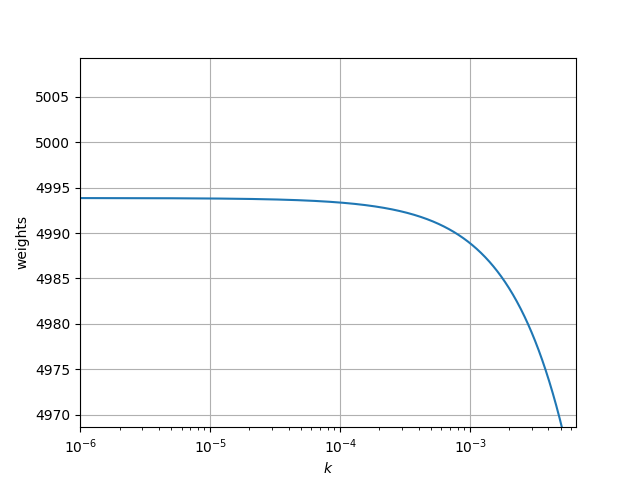
Finding ridge regression hyper-parameter \(k\)
- \(k \rightarrow \infty\) leads to \(c=0\)
- \(k = 0\) leads to regular least squares
- Examine “Ridge Trace” Plot
- Identify where the \(c\) stabilize
- In this case \(k\approx 1\times10^{-4}\)
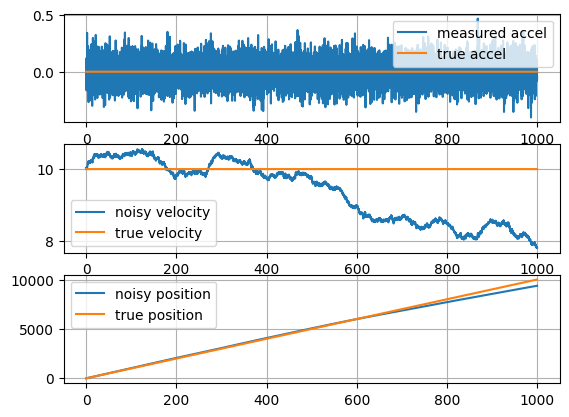
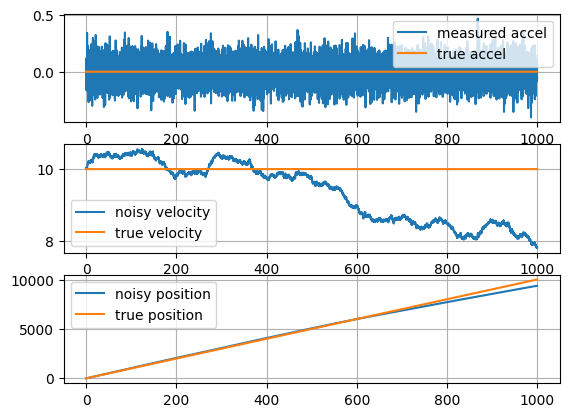
Inertial Navigation
- Inertial Measurement Unit (IMU)
- measures accelerations \(\vec{f}\)
- measures rotation rates \(\dot{\vec{\theta}}\)
- To get position from accleration, you have to integrate twice
- continuously adds noise to your position estimate
- Drifting position estimate needs to be corrected
- MagNav!
Required data sources
- Inertial Navigation System (INS)
- Angle rates, \(\Delta\theta\)
- Accelerations/specific forces, \(\Delta\vec{v}\)
- Barometer
- Precise but not accurate
- Stablize the altitude
- Magnetometers
- Scalar - primary sensor
- Vector - for compensation
- Magnetic Map
- Core field model e.g. WMM or IGRF
- Magnetic anomaly map
Kalman filter flow diagram
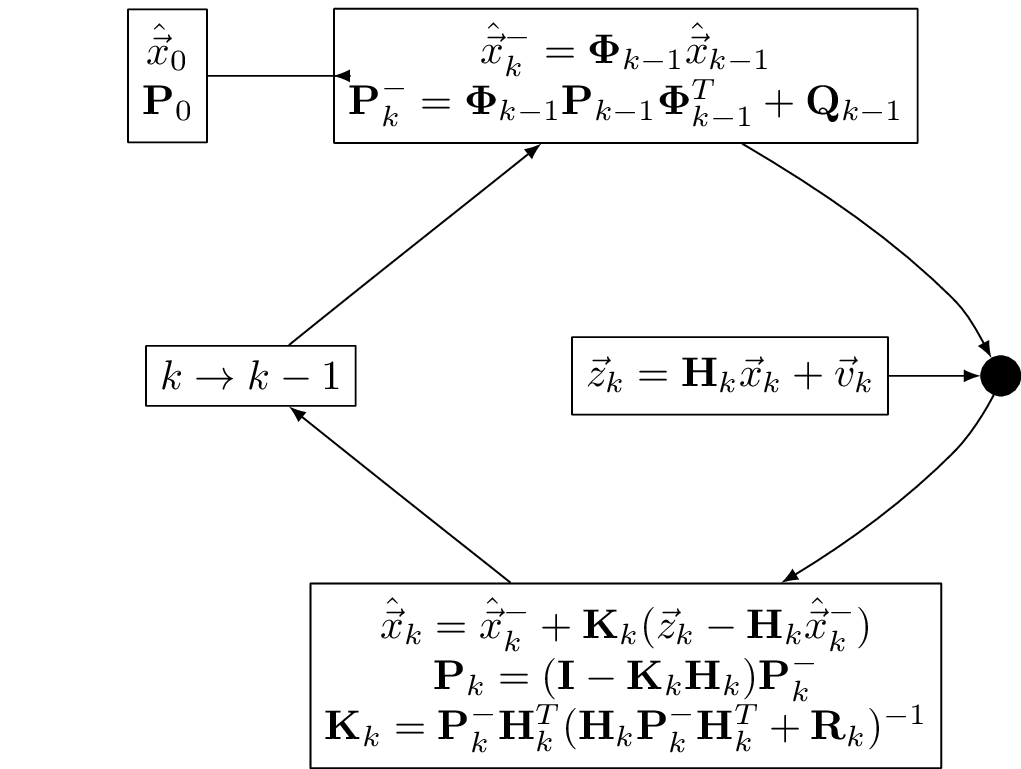
EKF data flow
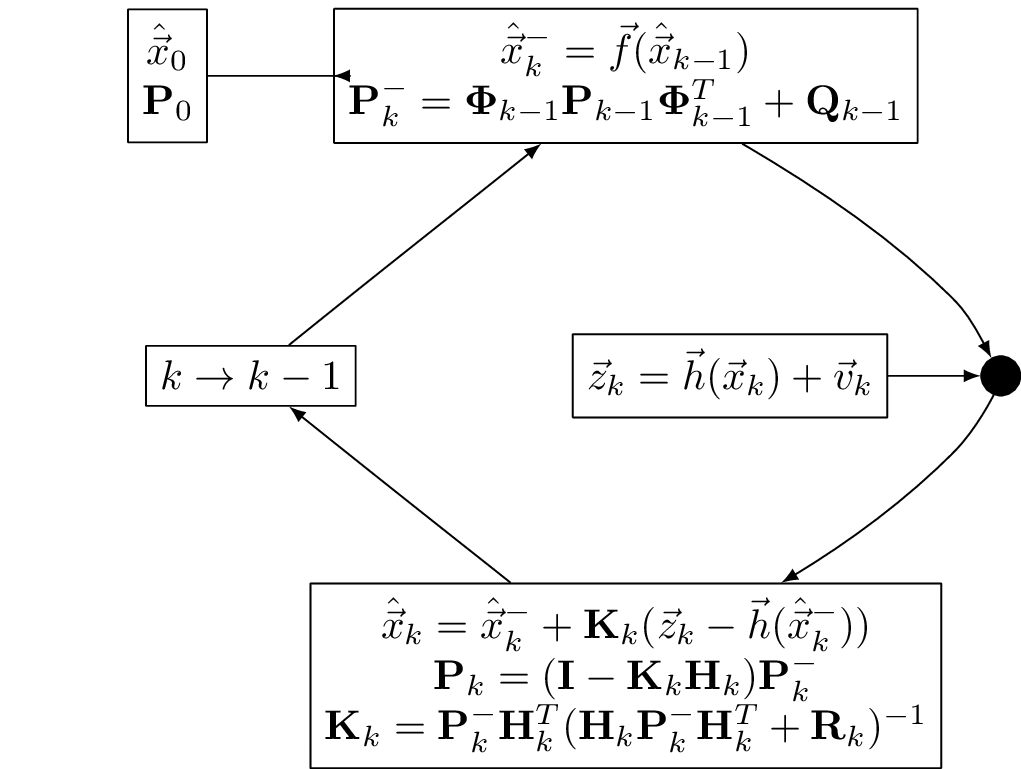
Simplified sequential processing
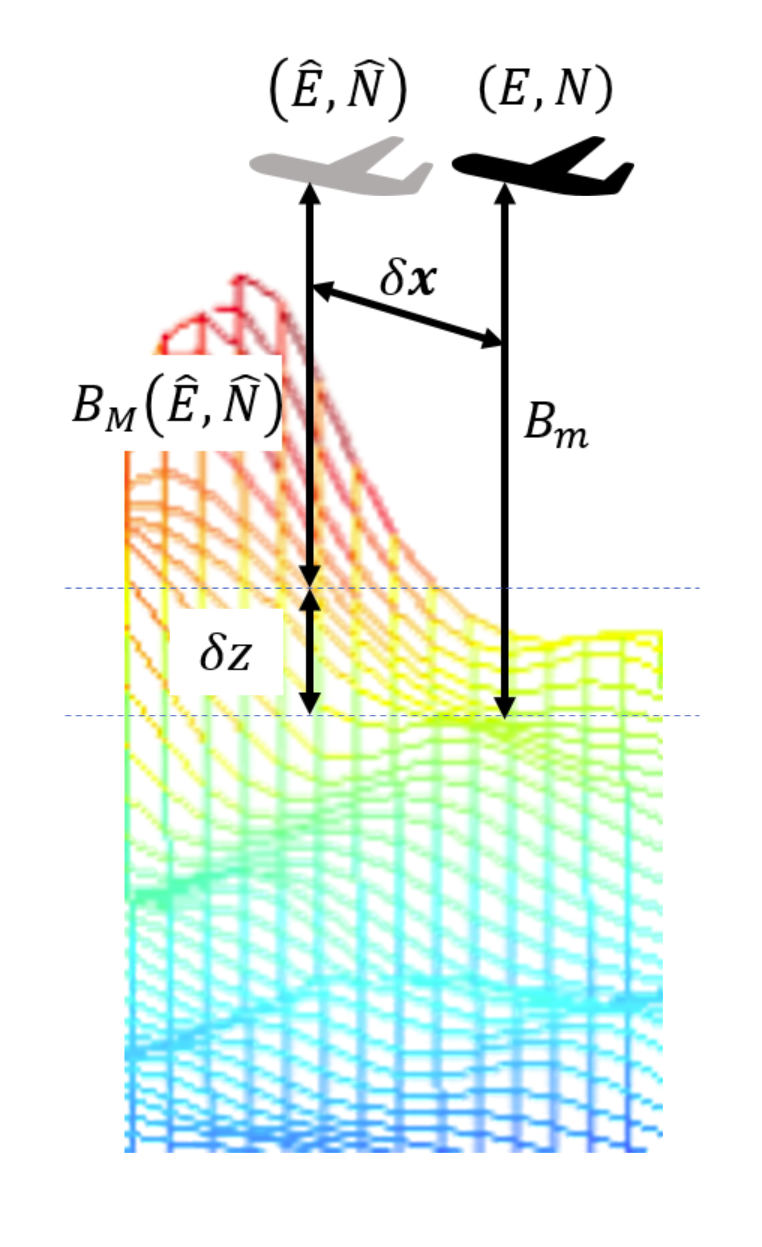
- Measurement processor: \(\delta z = B_\text{measured} - B_\text{map}(\hat{E},\hat{N})\)
- \(B_\text{measured}\) is measured magnetic field
- \(B_\text{map}(\hat{E},\hat{N})\) is the predicted map value based on position estimate
- State vector error: \(\delta \vec{x} = \left[ \delta E, \delta N \right]^T\)
- Measurement matrix: \(\mathbf{H} = \left[ \frac{\partial B_\text{map}(\hat{E},\hat{N})}{\partial E} \frac{\partial B_\text{map}(\hat{E},\hat{N})}{\partial N} \right]\)
- Measurement equation: \(\mathbf{H} \delta \vec{x}\)
- Update of the state vector error depends on the map gradients in East and North directions
Survey aircraft


T-38

F-16
F-16 photos approved for public release by Edwards AFB Public Affairs Office. Public Release number 20438.
C-17

Honeywell
References

Aschenbrenner, Hans. 1936. “Eine Anordnung Zur Regisrierung Rauscher Magnetischer Storungen.” Hochfrequenztechnik Und Elektoakustik 47 (6): 177–81.
Bankey, Viki, Alejandro Cuevas, David Daniels, Carol A. Finn, Israel Hernandez, Patricia Hill, Robert Kucks, et al. 2002. “Digital Data Grids for the Magnetic Anomaly Map of North America.” U.S. Department of the Interior, U.S. Geological Survey; Online; US Geological Survey. https://doi.org/10.3133/ofr02414.
Bell, William E., and Arnold L. Bloom. 1957. “Optical Detection of Magnetic Resonance in Alkali Metal Vapor.” Physical Review 107 (6): 1559–65. https://doi.org/10.1103/PhysRev.107.1559.
Bergeron, Luke, and Aaron Nielsen. 2023. “Aeromagnetic Anomaly Mapping for Navigation.” In Proceedings of IEEE/ION PLANS 2023.
Bloom, Arnold L. 1962. “Principles of Operation of the Rubidium Vapor Magnetometer.” Applied Optics 1 (1): 61. https://doi.org/10.1364/ao.1.000061.
Bonifaz, Jonnathan. 2022. “Magnetic Navigation Using Online Calibration Filter Analysis.” Master’s thesis, Air Force Institute of Technology. https://scholar.afit.edu/etd/5382/.
Bracken, Robert E., and Philip J. Brown. 2006. “Concepts and Procedures Required for Successful Reduction of Tensor Magnetic Gradiometer Data Obtained from an Unexploded Ordnance DetectionDemonstration at Yuma Proving Grounds,arizona.” 2006-1027. U.S. DEPARTMENT OF THE INTERIOR, U.S. GEOLOGICAL SURVEY.
Brown, Robert Grover, and Patrick Y C Hwang. 2012. Introduction to random signals and applied kalman filtering: with MATLAB exercises and solutions; 4th ed. New York, NY: Wiley.
Bulovic, Vladimir, Rajeev Rame, Steven Leeb, Jeffrey Lang, and Yu Gu. 2011. Electromagnetic Energy: From Motors to Lasers. Cambridge-MA: Massachusetts Institute of Technology. https://ocw.mit.edu/courses/electrical-engineering-and-computer-science/6-007-electromagnetic-energy-from-motors-to-lasers-spring-2011/.
Canciani, Aaron J. 2016. “Absolute Positioning Using the Earth’s Magnetic Field.” PhD thesis, Air Force Institute of Technology. https://scholar.afit.edu/etd/251.
———. 2021. “Magnetic Navigation on an F-16 Aircraft Using Online Calibration.” IEEE Trans. Aerospace and Electronic Systems. https://doi.org/10.1109/TAES.2021.3101567.
Canciani, Aaron, and John Raquet. 2017. “Airborne Magnetic Anomaly Navigation.” IEEE Transactions on Aerospace and Electronic Systems 53 (1): 67–80. https://doi.org/10.1109/TAES.2017.2649238.
Chulliat, A.;W. Brown;P. Alken;C. Beggan;M. Nair;G. Cox;A. Woods;S. Macmillan;B. Meyer;M. Paniccia; 2020. “The US/UK World Magnetic Model for 2020-2025 : Technical Report.” National Centers for Environmental Information (U.S.);British Geological Survey. https://doi.org/10.25923/ytk1-yx35.
Clarke, Daniel J. 2021. “Real-Time Aerial Magnetic and Vision-Aided Navigation.” Master’s thesis, Air Force Institute of Technology. https://scholar.afit.edu/etd/4994/.
Gauss, C. F. 1833. Intensitas Vis Magneticae Terrestris Ad Mensuram Absolutam Revocata. Sumtibus Dieterichianis. https://books.google.com/books?id=dJA\_AAAAcAAJ.
Gelb, Arthur et al. 1974. Applied Optimal Estimation. MIT press.
Gnadt, Albert R. 2022. “Machine Learning-Enhanced Magnetic Calibration for Airborne Magnetic Anomaly Navigation.” In AIAA SciTech 2022 Forum. https://doi.org/10.2514/6.2022-1760.
Gnadt, Albert R., Allan B. Wollaber, and Aaron P. Nielsen. 2022. “Derivation and Extensions of the Tolles-Lawson Model for Aeromagnetic Compensation.” arXiv. https://doi.org/10.48550/ARXIV.2212.09899.
GNSS, Inside. 2021. “Beyond GPS: Air Force Rethinks Position, Navigation and Timing.” Inside GNSS. https://insidegnss.com/beyond-gps-air-force-rethinks-position-navigation-and-timing/.
Griffiths, David J. 1999. Introduction to Electrodynamics. 3rd ed. Prentice Hall.
Hambling, David. 2021. “US Air Force Plane Navigates by Tiny Changes in Earth’s Magnetic Field.” New Scientist. https://www.newscientist.com/article/2283597-us-air-force-plane-navigates-by-tiny-changes-in-earths-magnetic-field/.
Hunt, Kenneth P., James J. Niemeier, and Anton Kruger. 2010. “RF Communications in Underwater Wireless Sensor Networks.” In 2010 IEEE International Conference on Electro/Information Technology. IEEE. https://doi.org/https://doi.org/10.1109/EIT.2010.5612087.
Ingram, Mark. 2021. “Air Force Rethinks Position, Navigation and Timing (PNT).” Online. https://www.afrl.af.mil/News/Article-Display/Article/2674037/air-force-rethinks-position-navigation-and-timing-pnt/.
Leliak, Paul. 1961. “Identification and Evaluation of Magnetic-Field Sources of Magnetic Airborne Detector Equipped Aircraft.” IRE Transactions on Aeronautical and Navigational Electronics ANE-8 (3): 95–105. https://doi.org/10.1109/TANE3.1961.4201799.
Luyendyk, APJ. 1997. “Processing of Airborne Magnetic Data.” AGSO Journal of Australian Geology and Geophysics 17: 31–38.
McNeil, Alexander J. 2022. “Magnetic Anomaly Absolute Positioning for Hypersonic Aircraft.” Master’s thesis, Air Force Institute of Technology. https://scholar.afit.edu/etd/5457.
Merayo, J M G, P Brauer, F Primdahl, J R Petersen, and O V Nielsen. 2000. “Scalar Calibration of Vector Magnetometers.” Measurement Science and Technology 11 (2): 120–32. https://doi.org/10.1088/0957-0233/11/2/304.
Meyer, B., A. Chulliat, and R. Saltus. 2017. “Derivation and Error Analysis of the Earth Magnetic Anomaly Grid at 2 Arc Min Resolution Version 3 (EMAG2v3).” Geochemistry, Geophysics, Geosystems 18 (12): 4522–37. https://doi.org/10.1002/2017gc007280.
MFAM Module Specifications, Laser Pumped Cesium Magnetometer. 2020. Geometrics, Inc. http://mfam.geometrics.com/.
Moser, P. M. 1989. “Extremely Low Frequency (ELF) Radar (Active Magnetic Anomaly Detection).” Pacific-Sierra Research Corporation. https://apps.dtic.mil/sti/citations/AD1011948.
Mount, Lauren A. 2018. “Navigation Using Vector and Tensor Measurements of the Earth’s Magnetic Anomaly Field.” Master’s thesis, Air Force Institute of Technology. https://scholar.afit.edu/etd/1817/.
Nielsen, Aaron, Jeremy Gray, and Jonnathan Bonifaz. 2022. “Accounting for Magnetic Anomaly Map Artifacts in Magnetic Navigators.” In ION GNSS+ 2022.
Rai, Ahjay. 2022. “Honeywell Successfully Demonstrates Alternative Navigation Capabilities in GPS-Denied Environments.” On-line. https://aerospace.honeywell.com/us/en/about-us/press-release/2022/04/honeywell-demonstrates-alternative-navigation-capabilities.
Raquet, John. 2021. “Pinson 15 Model.”
Reeves, Colin. 2005. Aeromagnetic Surveys; Principles, Practice & Interpretation. Geosoft.
Roberts, Carter W., and Robert C. Jachens. 2000. “Preliminary Aeromagnetic Anomaly Map of California.” United States Geologic Survey. https://pubs.usgs.gov/of/1999/0440/.
Smithsonian Institution. n.d. “Developing Inertial Navigation.” On-line. https://timeandnavigation.si.edu/satellite-navigation/reliable-global-navigation/inertial-navigation/developing-inertial-navigation.
Tierney, Tim M., Niall Holmes, Stephanie Mellor, José David López, Gillian Roberts, Ryan M. Hill, Elena Boto, et al. 2019. “Optically Pumped Magnetometers: From Quantum Origins to Multi-Channel Magnetoencephalography.” NeuroImage 199 (October): 598–608. https://doi.org/10.1016/j.neuroimage.2019.05.063.
Titterton, David, and John Weston. 2004. Strapdown Inertial Navigation Technology. Institution of Engineering; Technology. https://doi.org/dx.doi.org/10.1049/PBRA017E.
Tolles, W E, and J D Lawson. 1950. “Magnetic compensation of MAD equipped aircraft.” Airborne Instruments Lab. Inc., Mineola, NY, Rept, 201–1.
Tolles, W. E. 1954. Compensation of aircraft magnetic fields. 2692970, issued 1954.
———. 1955. Magnetic field compensation system. 2706801, issued 1955.
Vacquier, Victor V. 1945. Apparatus for responding to magnetic fields. 2407202, issued 1945. https://patents.google.com/patent/US2407202A/en.
Vaughn, Stacy. 2021. “C-17 Good Platform for MagNav Development.” On-line. https://www.445aw.afrc.af.mil/News/Article-Display/Article/2738695/c-17-good-platform-for-magnav-development/.
Yan, Zou. 475-221 BCE. Zou Yan Lu (Book of the Devil Valley Master). China: Unknown.
Social