
Introduction
ION MagNav Workshop 2023, Monterey, CA
The views expressed in this article are those of the author and do not necessarily reflect the official policy or position of the United States Government, Department of Defense, United States Air Force or Air University.
Distribution A: Authorized for public release. Distribution is unlimited. Case No. 2023-0427.
Magnetic Anomaly Navigation Overview
https://rpubs.com/friendly/test-newcommands https://quarto.org/docs/authoring/markdown-basics.html#equations
https://stackoverflow.com/questions/41362012/how-to-insert-font-awesome-icons-in-mathjax
Font-Awesome will only work for html type output
$$$$
Refrigerator magnet 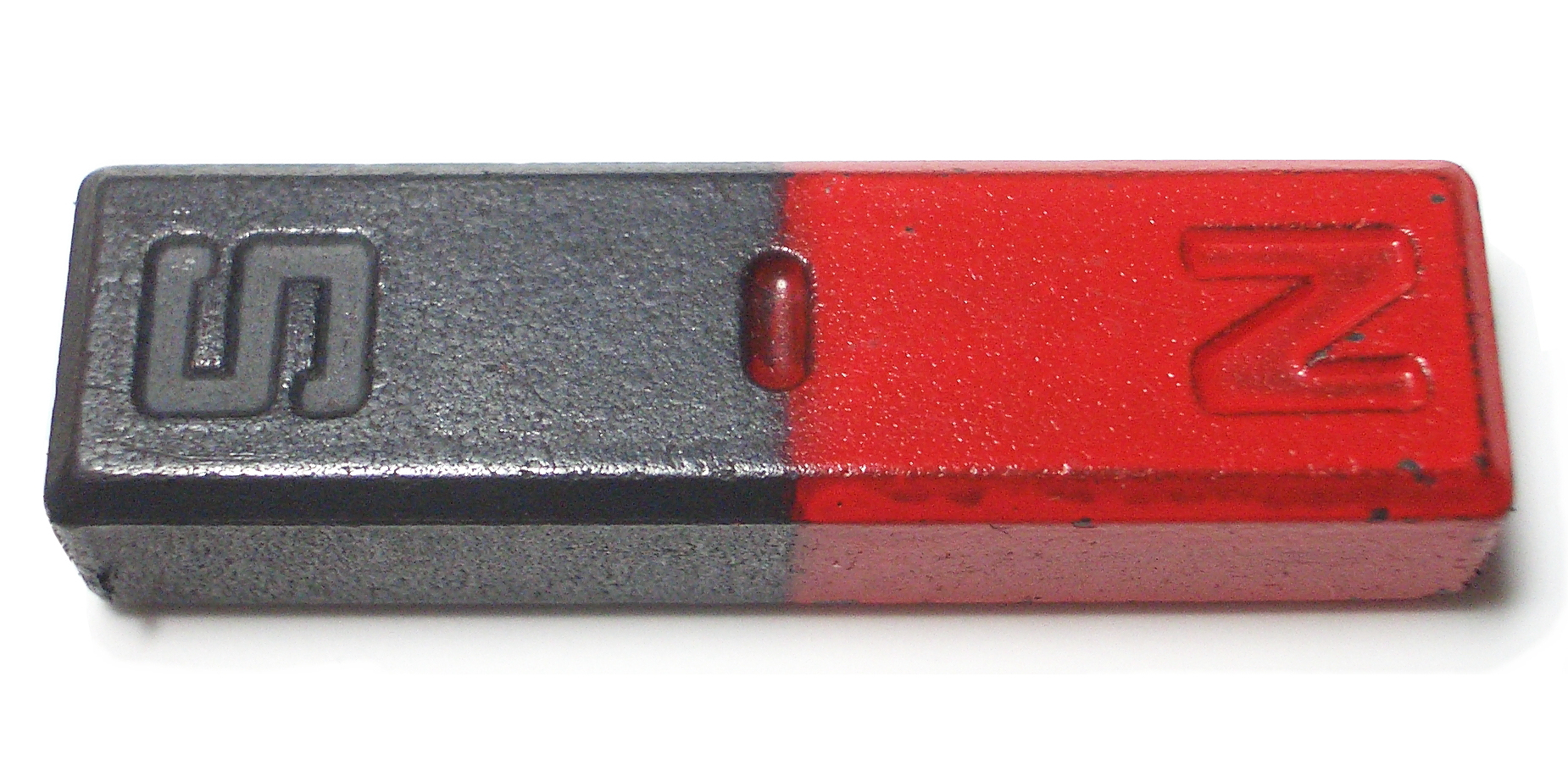
Earth’s core field (compass) 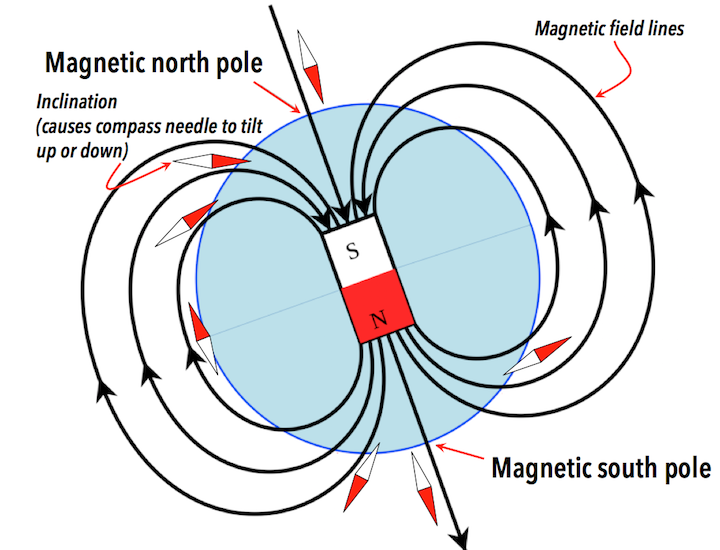
Crustal magnetic anomaly 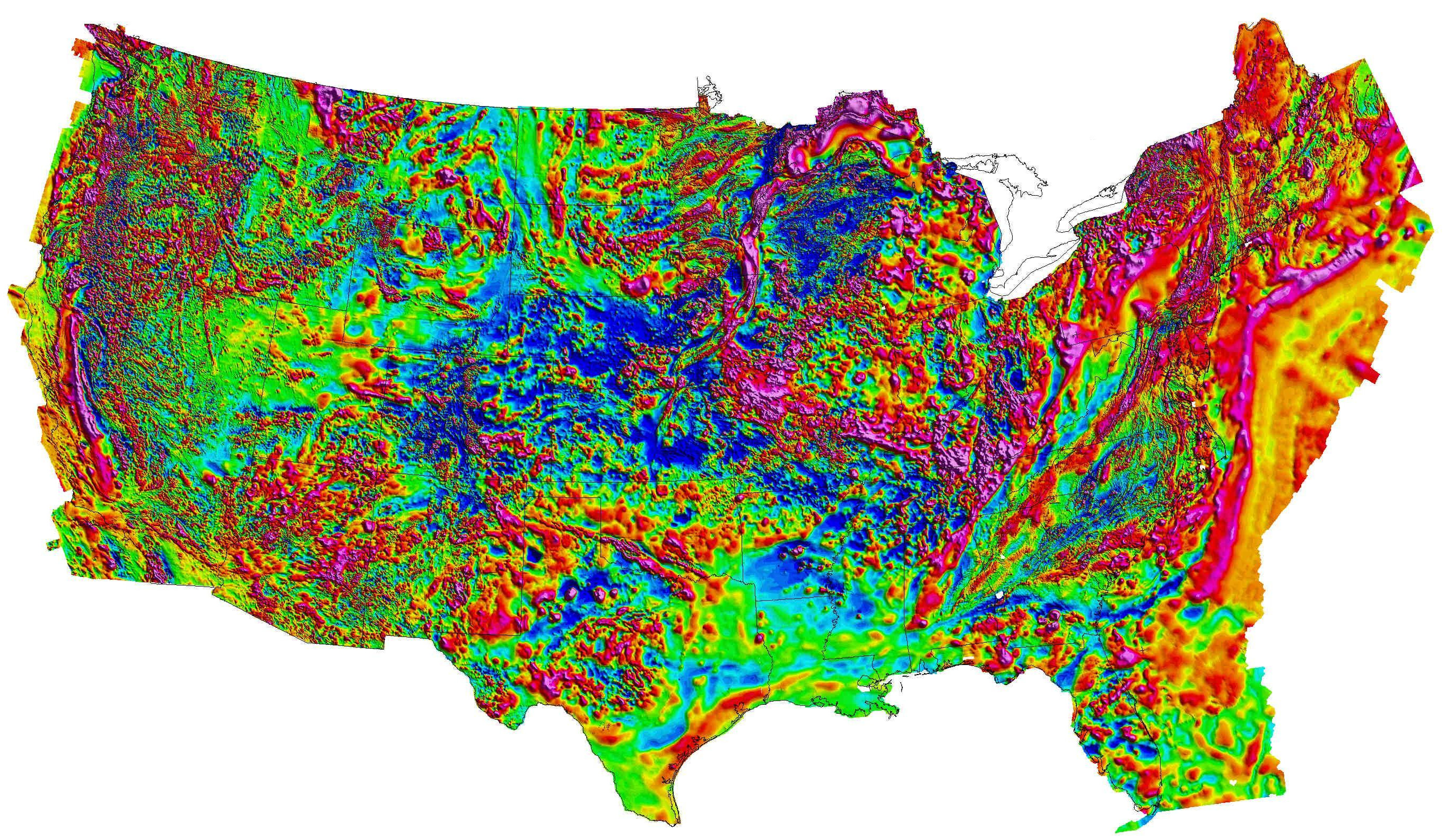
1 000 000 nT
Range \(\pm\) 500 nT
Resolution \(\sim\) 1 nT https://mrdata.usgs.gov/magnetic/ (Bankey et al. 2002)
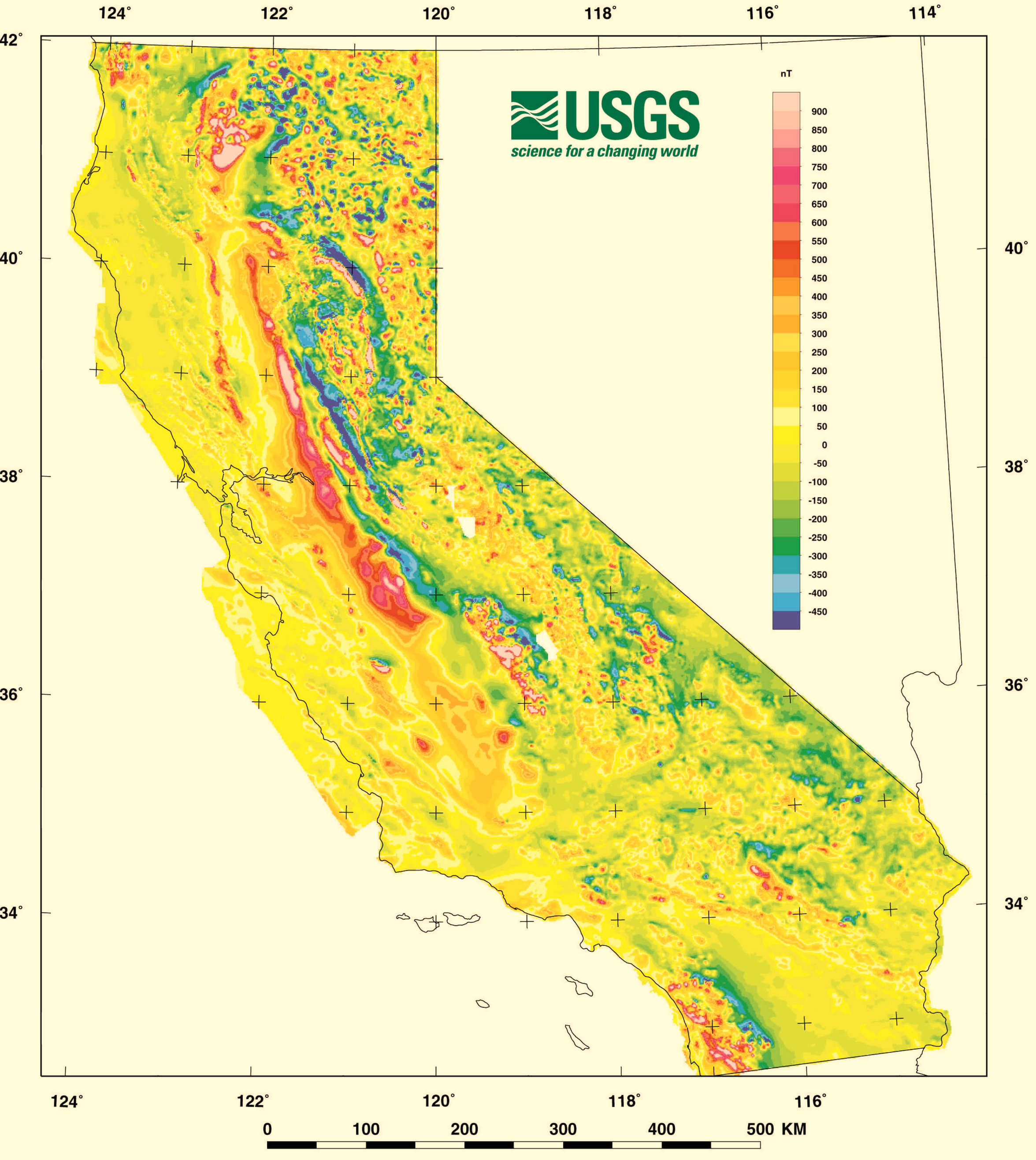
Map-based navigation
- Features are required to navigate
- Magnetic anomaly closely tied to geology
- less variation in coastal region
- direction variation in Central Valley
- more structure in Sierra Nevada mountains
- Area and direction of travel make a difference
(Roberts and Jachens 2000)
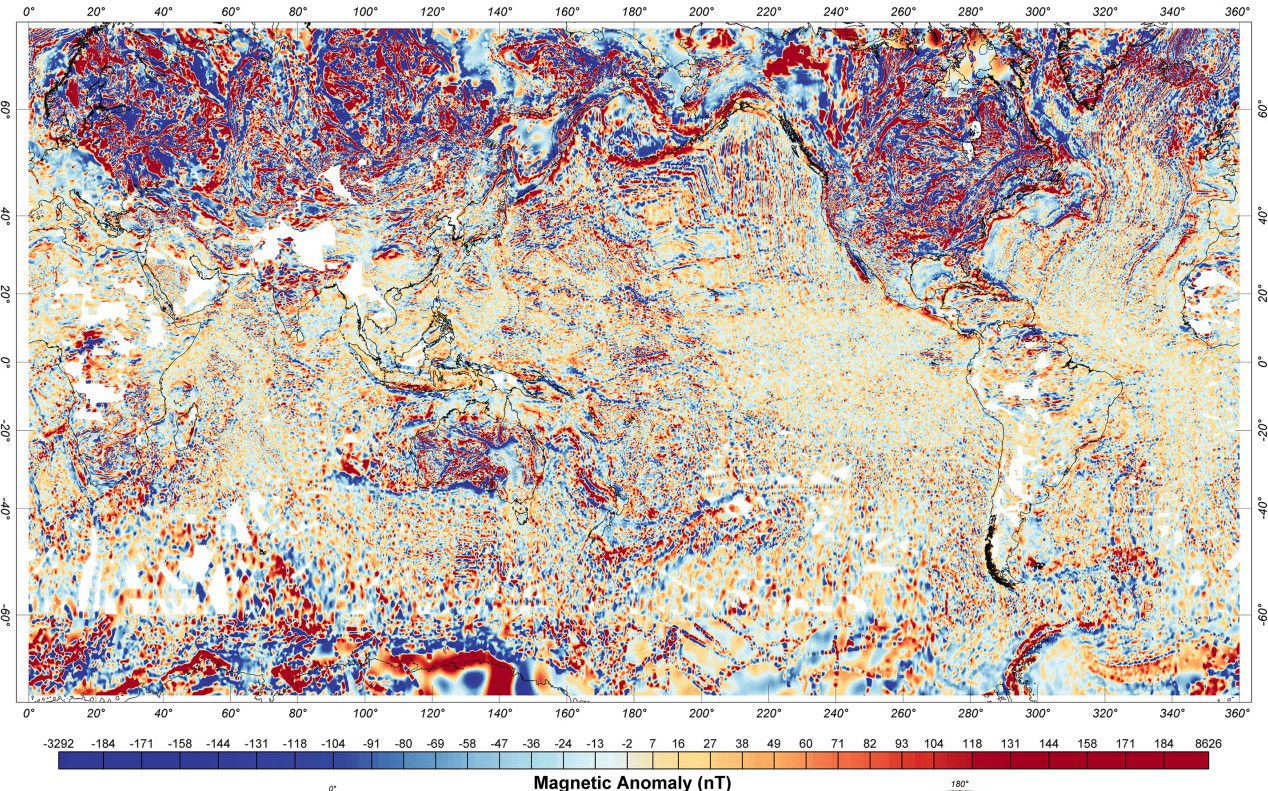
Map coverage required - Earth Magnetic Anomaly Grid 2-arcsec v3
Sensors

Vaquier towed magnetometer, National Museum of American History (Smithsonian Institution, n.d.) Ca. 1946
An airplane is a big magnet that flies

\(|\vec{B}_\text{sensor}| = |\vec{B}_{\oplus}+ \vec{B}_\text{anomaly}+ \vec{B}_\class{fa fa-plane}{}|\)
Aircraft Calibration
Sensor placement and installation
- Engineered location
- Stinger
- Survey for placement
- Non-magnetic fasteners
Degaussing
Algorithms
Return

Bankey, Viki, Alejandro Cuevas, David Daniels, Carol A. Finn, Israel Hernandez, Patricia Hill, Robert Kucks, et al. 2002. “Digital Data Grids for the Magnetic Anomaly Map of North America.” U.S. Department of the Interior, U.S. Geological Survey; Online; US Geological Survey. https://doi.org/10.3133/ofr02414.
Chulliat, A.;W. Brown;P. Alken;C. Beggan;M. Nair;G. Cox;A. Woods;S. Macmillan;B. Meyer;M. Paniccia; 2020. “The US/UK World Magnetic Model for 2020-2025 : Technical Report.” National Centers for Environmental Information (U.S.);British Geological Survey. https://doi.org/10.25923/ytk1-yx35.
Meyer, B., A. Chulliat, and R. Saltus. 2017. “Derivation and Error Analysis of the Earth Magnetic Anomaly Grid at 2 Arc Min Resolution Version 3 (EMAG2v3).” Geochemistry, Geophysics, Geosystems 18 (12): 4522–37. https://doi.org/10.1002/2017gc007280.
Roberts, Carter W., and Robert C. Jachens. 2000. “Preliminary Aeromagnetic Anomaly Map of California.” United States Geologic Survey. https://pubs.usgs.gov/of/1999/0440/.
Smithsonian Institution. n.d. “Developing Inertial Navigation.” On-line. https://timeandnavigation.si.edu/satellite-navigation/reliable-global-navigation/inertial-navigation/developing-inertial-navigation.